├ūä┘äPŻ¼═§╝tĮŁ
Ż©ųą═©Ę■ū╔įāįOėŗ蹊┐į║ėąŽ▐╣½╦ŠŻ¼ĮŁ╠K ─ŽŠ® 210019Ż®
0 ę² čį
▄ć┬ōŠW╩Ūśŗ│╔Į╗═©¾wŽĄĄ─ĻPµIę╗ŁhŻ¼═©▀^īó▄ć┼cŠWĮj▀BĮėŻ¼┐╔ęį×ķ▄ćā╚Ą─▓┐Ęų╬’¾w╠ß╣®╚½ĘĮ╬╗Ą─ą┼ŽóĪŻį┌▄ć┬ōŠWųąŻ¼▄ć┼c▄毩Vehicle-to-VehicleŻ¼V2VŻ®ų«ķgĄ─═©ą┼│ąō·ų°▒O£y▄ć▌v╬╗ų├ĪóęŲäė╦┘Č╚Īóų▄▀ģŁhŠ│Ą╚╚╬äšĪŻ╚šęµÅ═ļsĄ─▄ć┬ōŠWŁhŠ│║═▓╗öÓį÷ķLĄ─äėæBśIäšąĶŪ¾Įo▄ćė├▄ć▌vµ£┬Ęųąųžę¬ą┼ŽóĄ─░▓╚½é„▌öĦüĒ┴╦ą┬Ą─╠¶æŻ¼╚ń║╬į┌▄ć┬ōŠWųąī”▄ćė├═©ą┼µ£┬ĘųąĄ─ĻPµIą┼Žó▀MąąĖ▀ą¦Īó┐╔┐┐Ą─é„▀fŻ¼╩Ū─┐Ū░žĮ┤²ĮŌøQĄ─å¢Ņ}[1]ĪŻ×ķ╠ßĖ▀▄ć┬ōŠW¤oŠĆ═©ą┼Ą─┐╔┐┐ąįŻ¼ŽÓĻPŅIė“蹊┐╚╦åT▀Mąą┴╦╔Ņ╚ļĄ─蹊┐Ż¼▓ó╠ß│÷ę╗ĘN╗∙ė┌ĘõĖC▄ć┬ōŠW╝╝ągĄ─ą┬ą═Ž┬ąą¤oŠĆ═©ą┼┘Yį┤Ęų┼õĘĮĘ©ĪŻļm╚╗įōĘĮĘ©į┌ę╗Č©│╠Č╚╔Ž╠ß╔²┴╦═©ą┼é„▌öµ£┬ĘĄ─┐é╦┘┬╩ĪóĮĄĄ═┴╦ĢrčėŻ¼Ą½¤oĘ©ØMūŃÅ═ļsĄ─äėæBĘ■äšąĶ꬯¼Ūę│╔▒Š▌^Ė▀Ż¼▓╗▀mė├ė┌īŹĢrūā╗»Ą─▄ć┬ōŠWł÷Š░[2]ĪŻßśī”▀@ę╗å¢Ņ}Ż¼╬─š┬Å─┘Yį┤Ą─║Ž└ĒĘų┼õĮŪČ╚│÷░lŻ¼ĮY║Ž5G ŠWĮj╝╝ągŻ¼ķ_š╣▄ć┬ōŠWŽ┬ąą¤oŠĆ═©ą┼┘Yį┤Ęų┼õĘĮĘ©Ą─蹊┐Ż¼╠ß│÷ę╗ĘN╗∙ė┌5G ŠWĮj╝╝ągĄ─▄ć┬ōŠWŽ┬ąą¤oŠĆ═©ą┼┘Yį┤Ęų┼õĘĮĘ©Ż¼ęį╠ß╔²═©ą┼┘Yį┤Ą─└¹ė├ārųĄ║═└¹ė├┬╩ĪŻ
1 ╗∙ė┌5G ŠWĮj╝╝ągśŗĮ©▄ć┬ōŠWŽ┬ąą¤oŠĆ═©ą┼┘Yį┤Ėąų¬─Żą═
▄ć┬ōŠWŽ┬ąą¤oŠĆ═©ą┼┘Yį┤Ėąų¬─Żą═Ą─śŗĮ©╗∙ė┌5G ŠWĮj╝╝ągĪŻ5G ŠWĮj╝╝ągŠ▀ėąöĄō■é„▌ö╦┘Č╚┐ņĪóĖ▓╔w├µÅVĄ╚ā×ä▌[3]ĪŻ═¼ĢrŻ¼5G ŠWĮj╝╝ągĢrčėĄ═Ż¼ī”▄ć▌v║═ĮKČ╦Ą─Ēææ¬čĖ╦┘Ż¼╩ŪīŹ¼F▄ć┬ōŠWĘ■äš┐ņ╦┘ĪóĖ▀ą¦Īó┐╔┐┐Ą─ĻPµIĪŻį┌▄ć┬ōŠWŽ┬ąą¤oŠĆ═©ą┼┘Yį┤Ėąų¬ųąæ¬ė├5G ŠWĮj╝╝ągŻ¼┐╔ęįĖ∙ō■ĦīÆ┘Yį┤╣└ėŗŠÓļxĖąų¬Š½Č╚ĪŻ▄ć▌vė├æ¶ĮKČ╦Ą─ŠÓļxĖąų¬Š½Č╚║═Ęų┼õĄ─Ėąų¬┘Yį┤ėŗ╦Ń╣½╩Į×ķ
╩ĮųąŻ║”żlk(W1)▒Ē╩Š▄ć▌vė├æ¶ĮKČ╦Ą─ŠÓļxĖąų¬Š½Č╚Ż╗c▒Ē╩Š╣Ō╦┘Ż¼╚ĪųĄ×ķ▒Ē╩Š▄ć┬ōŠWŽ┬ąą¤oŠĆ═©ą┼╗∙šŠĄ─Ėąų¬ą┼╠¢ą┼įļ▒╚Ż╗W1▒Ē╩ŠŅlūV┘Yį┤Ęų┼õ▒╚└²ĪŻ
═©ą┼─Ż╩ĮĘų×ķų▒Įė═©ą┼─Ż╩Į┼cųą└^═©ą┼─Ż╩ĮĪŻŲõųąŻ¼ų▒Įė═©ą┼─Ż╩Į╩Ū╗∙šŠ═©▀^▄ć▌vĄĮŠWĮjŻ©Vehicleto-NetworkŻ¼V2NŻ®µ£┬Ę▀MąąöĄō■é„▌ö[4]ĪŻßśī”▄ć▌dįOéõĄ─▀\äė╠ž³cŻ¼╝┘įO▄ć▌vė├æ¶ĮKČ╦║═╗∙šŠų╗─▄½@╚Ī▌^┤¾ĘČć·Ą─ą┼Ą└į÷굹┼ŽóŻ¼į┌▀MąąöĄō■é„▌öĢrŻ¼ąĶę¬┤_Č©┘Yį┤Ęų┼õ╦┘┬╩ĪŻųą└^═©ą┼─Ż╩ĮųĖöĄō■Ž╚═©▀^ųą└^é„▌öŻ¼╚╗║¾═©▀^V2N µ£┬Ęų▒Įėé„▌öĄĮĮKČ╦Ż¼ŪęV2Vµ£┬Ę┐╔ęįī”┘Yį┤▀MąąÅ═ė├ĪŻ
2 ▄ć┬ōŠW▄ć▌vĘų┤ž
ė╔ė┌▄ć▌vĄ─ęŲäė╠žąįŻ¼ė╔V2VĪóV2N Ą╚µ£┬ĘśŗĮ©Ą─ŠWĮjĘĆČ©ąį▌^▓ŅŻ¼ė░Ēæ║¾└mµ£┬Ę┘Yį┤┼õų├▓▀┬įĄ─ąį─▄ĪŻ×ķĮŌøQ▀@ę╗å¢Ņ}Ż¼╬─š┬öM▓╔ė├5G ŠWĮj╝╝ąg½@╚Ī▄ć▌v╬╗ų├ą┼Žó║═▀\ąą╦┘Č╚Ż¼ŅA£y▄ć▌vį┌─│ę╗Ģr┐╠Ą─ęŲäėŪķør▓ó▀MąąĘųĮMŻ¼Ęų╬÷▄ć▌vĄ─ęŲäė╠žąįĪŻĖ∙ō■Ęų╬÷Ą─ęŲäė╠žąį▀xō±═©ą┼ĘĮ╩ĮŻ¼Å─Č°śŗĮ©ę╗ŚlĘĆČ©Ą─═©ą┼µ£[5]ĪŻĖ∙ō■╗∙ė┌5G ŠWĮj╝╝ągĄ─▄ć┬ōŠWŽ┬ąą¤oŠĆ═©ą┼┘Yį┤Ėąų¬─Żą═╣└ėŗĄ─╬╗ų├ą┼ŽóŻ¼ėŗ╦Ń«öŪ░Ģr┐╠Ą─╣└ėŗ╦┘Č╚Ż¼╣½╩Į×ķ
╩ĮųąŻ║v▒Ē╩Š«öŪ░Ģr┐╠Ą─╣└ėŗ╦┘Č╚Ż╗lk▒Ē╩Š«öŪ░Ģr┐╠Š▀ėąę╗Č©š`▓ŅĄ─▄ć▌vė├æ¶ĮKČ╦╬╗ų├ą┼ŽóŻ╗lk-1▒Ē╩ŠŪ░ę╗Ģr┐╠▄ć▌vė├æ¶ĮKČ╦╬╗ų├ą┼ŽóŻ╗”żt▒Ē╩ŠĢrķg▓ŅĪŻĖ∙ō■╣└ėŗ╦┘Č╚v║═Ū░ę╗Ģr┐╠Ą─╬╗ų├ą┼Žólk-1Ż¼ėŗ╦Ń│÷«öŪ░Ģr┐╠Ą─╬╗ų├ą┼Žó║═╚║╝»ĢrķgķgĖ¶ĪŻ╚║╝»ĢrķgķgĖ¶╩ŪųĖīó▄ć▌vė├æ¶ĮKČ╦Ą─╬╗ų├ą┼ŽóęĢ×ķę╗ŽĄ┴ąļx╔óĄ─³cŻ¼▀@ą®³cų«ķgĄ─ĢrķgķgĖ¶Š═╩Ū╚║╝»ĢrķgķgĖ¶Ż¼ę“┤╦┐╔ęį═©▀^ėŗ╦Ń╝»╚║ĢrķgķgĖ¶Ż¼ŅA£y▄ć▌vĮKČ╦Ą─╬╗ų├ą┼ŽóĪŻĖ∙ō■½@╚ĪĄ─▄ć▌vČ©╬╗ą┼ŽóĮY╣¹╝»Ż¼ī”▄ć▌v▀Mąą╚║ĮMäØĘųŻ¼▓ó┤_Č©╚║ĮMųąĄ─▄ćµ£ĪŻį┌tĢr┐╠Ż¼▄ć▌vĘų┤žĮY╣¹┐╔▒Ē╩Š×ķ
╩ĮųąŻ║C▒Ē╩ŠĘų┤žĮY╣¹Ż╗Cluster▒Ē╩ŠĘų┤ž║»öĄŻ╗L▒Ē╩Š▄ć▌vĮKČ╦╬╗ų├ą┼ŽóŻ╗P▒Ē╩Š▄ć▌vė├æ¶įOéõŻ©Vehicle User EquipmentŻ¼VUEŻ®ĄĮ╗∙šŠĄ─Įė╩š╣”┬╩ĪŻ
¼FėąĄ─▄ć┬ōŠW▄ć▌vĘų┤žĘĮĘ©ėą2 ĘNĪŻę╗ĘN╩Ū╗∙ė┌ŠÓļxĄ─Š█ŅÉ╦ŃĘ©Ż¼Ė∙ō■▄ć▌vķgĄ─ŠÓļxīó▄ć▌vŠ█ŅÉ│╔ę╗Č©öĄ─┐Ą─Š█ŅÉĪŻĄ½įōĘĮĘ©║▄ļyĮŌøQ╔ó³c│╔┤žĪóŠ█ŅÉ▓╗ĘĆČ©Ą╚å¢Ņ}ĪŻ┴Ēę╗ĘN╩Ūßśī”│Ū╩ąģ^ė“ā╚▄ć▌vĄ─Š█ŅÉĘĮĘ©Ż¼Ė∙ō■ŠWĮjĘŪęĢŠÓŻ©Non Line of SightŻ¼NLOSŻ®ŠWĮjųąĄ─▄ć▌vĘų▓╝Ūķør▀MąąĘųĮMŻ¼─▄ē“ėąą¦ĮŌøQ▄ć▌vĘųĮM╔óüyĪó▓╗Š∙ä“Ą╚å¢Ņ}ĪŻĄ½╩Ūø]ėą┐╝æ]ĄĮ▄ć┼c▄ćų«ķgĄ─µ£Įėą¦æ¬Ż¼ų┬╩╣Ė³ČÓĄ─NLOS ═©ą┼▄ć▌vŠ█╝»į┌ę╗ŲĪŻę“┤╦Ż¼╬─š┬öM▓╔ė├Delaunay ╚²ĮŪ╗»╦╝Žļīó2 ĘNĘĮĘ©▀MąąėąÖCĮY║ŽŻ¼╠ß│÷ę╗ĘNą┬Ą─╗∙ė┌Delaunay ╚²ĮŪ╗»Ą─ČÓ─┐ś╦ā×╗»╦ŃĘ©ĪŻĄ┌ę╗▓ĮŻ¼ė├Delaunay ╚²ĮŪ╗»╦ŃĘ©ī”ęčų¬▄ć▌v▀Mąą╠Ä└ĒŻ¼šę│÷┼c«öŪ░▄ć▌vėąų▒ĮėęĢŠÓĻPŽĄĄ─Ųõ╦¹▄ć▌vĪŻįōĘĮĘ©│õĘų└¹ė├┴╦Delaunay╚²ĮŪą╬Ą─┐╔öUš╣ąįŻ¼īó³cP ╠Ē╝ėĄĮDelaunay ╚²ĮŪą╬ųąŻ¼ų╗ąĶ╚ź│²║¼ėąP ³cĄ─╚½▓┐╚²ĮŪą╬Ż¼īóP ┼c╚½▓┐┐╔ęĢ³c▀BĮėŲüĒŻ¼▓ó░┤ššĒśą“▀Mąą▓ÕųĄĪŻ▀@śėŠ═┐╔ęįį┌├┐ę╗┤╬▓ÕųĄų«║¾Ż¼īóęčĮø┤_Č©║├Ą─Delaunay ╚²ĮŪęŲ│²Ż¼▓ó£p╔┘ī”═ŌĮėłAųą║¼ėąįō³cĄ─╚²ĮŪą╬Ą─Öz╦„┤╬öĄĪŻĄ┌Č■▓ĮŻ¼▀x╚Īų▒┬ō▄ć▌vöĄ─┐ūŅČÓŪęĮė╩š╣”┬╩ūŅ┤¾Ą─▄ć▌vū„×ķ┤ž╩ūĪŻĄ┌╚²▓ĮŻ¼īó┼cįō┤ž╩ūų▒ĮėŽÓ▀BŪęā╔š▀┬³╣■ŅDŠÓļxŻ©Manhattan DistanceŻ®ąĪė┌ķōųĄĄ─▄ć▌vÜw×ķę╗┤žĪŻĄ┌╦─▓ĮŻ¼ųžÅ═Ą┌Č■▓Į║═Ą┌╚²▓ĮŻ¼ų▒ų┴═Ļ│╔╦∙ėą▄ć▌vĄ─Ęų┤žŻ¼▌ö│÷▄ć▌vĘų┤žĮY╣¹ĪŻ
3 įOų├Ž┬ąą¤oŠĆ═©ą┼µ£┬Ęą┼Ė╔įļ▒╚╝s╩°Śl╝■┼c┘Yį┤Ęų┼õ
ĮY║ŽÅ═ļsČ╚▌^Ą═Ą─łDų°╔½å¢Ņ}Ż©Graph Coloring ProblemŻ¼GCPŻ®Ż¼╚½├µĘų╬÷▄ć▌vŠ█ŅÉĮY╣¹║═╦∙ąĶĄ─š{Č╚ę“╦žĪŻ×ķ┤_▒ŻV2V µ£┬ĘĄ─┐╔┐┐ąįŻ¼ąĶę¬įOų├Ž┬ąą¤oŠĆ═©ą┼µ£┬Ęą┼Ė╔įļ▒╚Ż©Signal-to-Interference and Noise RatioŻ¼SINRŻ®╝s╩°Śl╝■Ż¼ęį┼ąČ©╩Ūʱ┤µį┌▓╗─▄╚▌╚╠Ą─Ė╔╔µĪŻ╝s╩°Śl╝■Č©┴x×ķ
╩ĮųąŻ║”├▒Ē╩ŠŽ┬ąą¤oŠĆ═©ą┼µ£┬Ęą┼įļ▒╚╝s╩°║»öĄŻ╗Pg(di)▒Ē╩Šą┼Ė╔įļ▒╚Ż╗Pg(di,j)▒Ē╩Ši³c┼cj³cĄ─▀ģą┼Ė╔įļ▒╚Ż╗”ę▒Ē╩Šš{Č╚ę“ūėŻ╗”├th▒Ē╩Šą┼Ė╔įļ▒╚ķōųĄĪŻ«ö╝s╩°Śl╝■▓╗│╔┴óĢrŻ¼ąĶę¬Å─Ė╔ö_╝»║Žųą╚ź│²ūŅ┤¾Ą─Ė╔ö_µ£┬ĘŻ¼▓óśŗĮ©╣سci║═╣سcjĄ─▀ģŻ¼ų▒ĄĮØMūŃ╝s╩°Śl╝■ĪŻ
GCP Ą─╦╝┬Ę╩ŪŽ╚ī”▀ģöĄūŅČÓĄ─╣سc▀Mąąų°╔½Ż¼į┘ī”▀ģöĄūŅČÓĄ─╣سc▀Mąąų°╔½Ż¼ęį┤╦ŅÉ═ŲĪŻŲõ─┐ś╦╩Ū┤_▒Ż2 éĆŽÓÓÅĄ─╣سc▒╗ų°╔Ž▓╗═¼Ą─Ņü╔½Ż¼╩╣ŽÓ▀BĮėĄ─╣سc▒M┐╔─▄Č╝▒╗ų°╔½ĪŻį┌ų°╔½▀^│╠ųąŻ¼ļSų°Ęų┼õĄĮ▄ć▌v╔ŽĄ─┘Yį┤ģ^ēKĄ─į÷┤¾Ż¼Ė„ė░Ēæę“╦žĢ■£pąĪŻ¼Å─Č°┤_▒ŻĘų┼õĮo▄ć▌vĄ─┘Yį┤ģ^ēKĘ¹║Žé„▌öę¬Ū¾ĪŻ
4 ī”▒╚īŹ“×
ĮY║Ž5G ŠWĮj╝╝ągŻ¼╠ß│÷┴╦ę╗ĘN╗∙ė┌ėŗ╦Ń┐žųŲ═©ą┼╚┌║ŽĄ─┘Yį┤Ęų┼õĘĮĘ©ĪŻ×ķ“×ūCįōĘĮĘ©╩Ūʱ─▄ē“ĮŌøQ¼FėąĘų┼õĘĮĘ©į┌īŹļHæ¬ė├ųą┤µį┌Ą─å¢Ņ}Ż¼ķ_š╣ī”▒╚īŹ“×ĪŻįOų├╗∙ė┌ČÓųŪ─▄¾wģfū„īW┴ĢĄ─Ęų┼õĘĮĘ©×ķī”ššAĮMŻ¼╗∙ė┌ėŗ╦Ń┐žųŲ═©ą┼╚┌║ŽĄ─Ęų┼õĘĮĘ©×ķī”ššB ĮMŻ¼╬─š┬╠ß│÷Ą─╗∙ė┌5G ŠWĮj╝╝ągĄ─Ęų┼õĘĮĘ©įOų├×ķīŹ“×ĮMĪŻĘųäeīó3 ĮMĘų┼õĘĮĘ©æ¬ė├ė┌ŽÓ═¼Ą─īŹ“ףhŠ│Ż¼Ęų┼õ▄ć┬ōŠWŽ┬ąą╬’┬ō═©ą┼┘Yį┤ĪŻį┌īŹ“ףhŠ│ųąŻ¼▄ć▌vĄ─░l╔õČ╦┼cĮė╩šČ╦Š∙▓╔ė├å╬╠ņŠĆŻ¼═©▀^┐šķg▓┤╦╔▀^│╠ļSÖC▓┐╩▄ć▌vĄ─│§╩╝╬╗ų├Ż¼īŹ“×ģóöĄęŖ▒Ē1ĪŻ
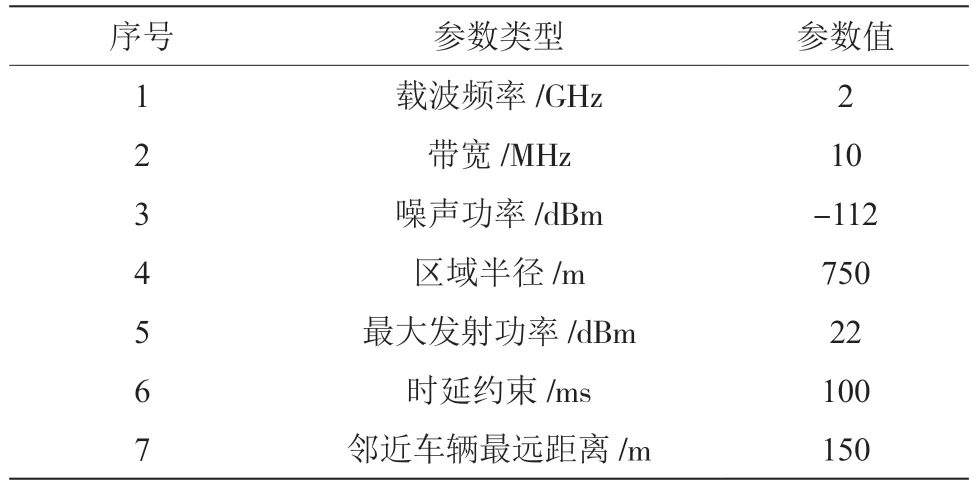
▒Ē1 īŹ“×ģóöĄ
×ķ“×ūC3 ĘNĘų┼õĘĮĘ©Ą─Ęų┼õ║Ž└ĒąįŻ¼īóŽ┬ąą¤oŠĆ═©ą┼═╠═┬┴┐ū„×ķ║Ō┴┐Ęų┼õ╩Ūʱ║Ž└ĒĄ─ųĖś╦ĪŻŽ┬ąą═╠═┬┴┐Ą─ėŗ╦Ń╣½╩Į×ķ
╩ĮųąŻ║”ų▒Ē╩ŠŽ┬ąą═╠═┬┴┐Ż╗s▒Ē╩Š▄ć┬ōŠWŽ┬ąą¤oŠĆ═©ą┼µ£┬ĘķLČ╚Ż╗t▒Ē╩Š▄ć┬ōŠWŽ┬ąą¤oŠĆ═©ą┼ŲĮŠ∙Ēææ¬ĢrķgĪŻ”ųųĄįĮĖ▀Ż¼šf├„Ž┬ąą¤oŠĆ═©ą┼é„▌ööĄō■┴┐įĮČÓŻ¼═©ą┼┘Yį┤└¹ė├┬╩įĮĖ▀Ż¼Ęų┼õįĮ║Ž└ĒŻ╗”ųųĄįĮĄ═Ż¼šf├„Ž┬ąą¤oŠĆ═©ą┼é„▌ööĄō■┴┐įĮ╔┘Ż¼═©ą┼┘Yį┤└¹ė├┬╩įĮĄ═Ż¼Ęų┼õįĮ▓╗║Ž└ĒĪŻĖ∙ō■╔Ž╩÷▀ē▌ŗŻ¼Ęųäeėøõøį┌10▌vĪó20 ▌vĪó30 ▌vĪó40 ▌vęį╝░50 ▌vŲ¹▄ćĄ─ŪķørŽ┬Ż¼3ĮMĘų┼õĘĮĘ©ī”æ¬Ą─▄ć┬ōŠWŽ┬ąą═╠═┬┴┐Ż¼£yįćĮY╣¹╚ń▒Ē2 ╦∙╩ŠĪŻ

▒Ē2 ▄ć┬ōŠWŽ┬ąą═╠═┬┴┐ėøõø▒Ē
ė╔▒Ē2 ┐╔ų¬Ż¼īŹ“×ĮMŽ┬ąą═╠═┬┴┐ūŅĖ▀Ż¼Ųõ┤╬×ķī”ššA ĮMŻ¼ī”ššB ĮMūŅĄ═ĪŻ▓╔ė├īŹ“×ĮMĄ─Ęų┼õĘĮĘ©ĢrŻ¼Ž┬ąą¤oŠĆ═©ą┼é„▌ööĄō■┴┐ūŅČÓŻ¼═©ą┼┘Yį┤Ą─└¹ė├┬╩ūŅĖ▀Ż¼▓óŪęĘų┼õūŅ║Ž└ĒĪŻę“┤╦Ż¼╗∙ė┌5G ŠWĮj╝╝ągĄ─Ęų┼õĘĮĘ©─▄ē“īŹ¼Fī”▄ć┬ōŠWŽ┬ąą¤oŠĆ═©ą┼┘Yį┤Ą─║Ž└ĒĘų┼õŻ¼─▄ē“╠ß╔²┘Yį┤└¹ė├ārųĄĪŻ
5 ĮY šō
ęį▄ć┬ōŠWŽ┬ąą¤oŠĆ═©ą┼┘Yį┤Ęų┼õå¢Ņ}×ķ蹊┐ųž³cŻ¼ĮY║Ž5G ŠWĮj╝╝ągŻ¼╠ß│÷┴╦ę╗ĘN╚½ą┬Ą─Ęų┼õĘĮĘ©ĪŻķ_š╣ī”▒╚īŹ“ׯ¼īóįōĘĮĘ©┼c¼FėąĄ─╗∙ė┌ČÓųŪ─▄¾wģfū„īW┴ĢĄ─Ęų┼õĘĮĘ©║═╗∙ė┌ėŗ╦Ń┐žųŲ═©ą┼╚┌║ŽĄ─Ęų┼õĘĮĘ©▀Mąąī”▒╚ĪŻĮY╣¹▒Ē├„╬─š┬╦∙╠ßĘĮĘ©Ą─é„▌ööĄō■┴┐Ė³ČÓŻ¼═©ą┼┘Yį┤Ą─└¹ė├┬╩Ė³Ė▀Ż¼Ęų┼õĖ³║Ž└ĒŻ¼┐╔ęįīŹ¼FūŅāץ─▄ć┬ōŠWŽ┬ąą═©ą┼ąį─▄į÷ęµĪŻ