š¬ę¬Ż║ßśī”(du©¼)¼F(xi©żn)ėąĖ▀╦┘╣½┬Ę╣▄└ĒŽĄĮy(t©»ng)¤o(w©▓)Ę©ī”(du©¼)▄ć(ch©ź)▌v▀M(j©¼n)ąąīŹ(sh©¬)Ģr(sh©¬)╣▄└ĒĄ─¼F(xi©żn)ĀŅŻ¼╠ß│÷ę╗ĘNī”(du©¼)Ė▀╦┘╣½┬Ę╔Ž▄ć(ch©ź)▌v▀M(j©¼n)ąąīŹ(sh©¬)Ģr(sh©¬)£y(c©©)╦┘╝░Č©╬╗Ą─ĘĮĘ©ĪŻįōĘĮĘ©╗∙ė┌╔õŅlūR(sh©¬)äeŻ©RFIDŻ®╝╝ąg(sh©┤)Ż¼═©▀^(gu©░)Ęų╬÷śŗ(g©░u)Į©ęŲäė(d©░ng)▄ć(ch©ź)▌vĄ─Č©╬╗─Żą═Ż¼└¹ė├ūV╣└ėŗ(j©¼)ĘĮĘ©ī”(du©¼)ŲõČÓŲš└šŅlęŲ▀M(j©¼n)ąą£y(c©©)┴┐Ż¼▓óßśī”(du©¼)─Żą═Ū¾ĮŌųą┤µį┌Ą─ĘŪŠĆąį╠žąįŻ¼▓╔ė├┼ŻŅDĄ³┤·Ę©ėŗ(j©¼)╦Ń▄ć(ch©ź)▌vĄ─īŹ(sh©¬)Ģr(sh©¬)╦┘Č╚╝░ŽÓī”(du©¼)ū°ś╦(bi©Īo)ęį▀_(d©ó)ĄĮ£y(c©©)┴┐▄ć(ch©ź)╦┘╝░┤_Č©▄ć(ch©ź)▌vīŹ(sh©¬)Ģr(sh©¬)╬╗ų├Ą──┐Ą─ĪŻĘ┬šµīŹ(sh©¬)“×(y©żn)ĮY(ji©”)╣¹▒Ē├„Ż¼įōĘĮĘ©Š▀ėą▀\(y©┤n)╦Ń┴┐ąĪĪóŠ½Č╚Ė▀ĪóīŹ(sh©¬)╩®║å(ji©Żn)å╬Ą─╠ž³c(di©Żn)ĪŻ
1 Ė┼╩÷
╔õŅlūR(sh©¬)äeŻ©Radio Frequency Identification, RFIDŻ®╩Ūę╗ĒŚ(xi©żng)ĘŪĮėė|╩Įūįäė(d©░ng)ūR(sh©¬)äe╝╝ąg(sh©┤)Ż¼Š▀ėąą┼Žó┴┐┤¾Īó┐╣Ė╔ö_ÅŖ(qi©óng)Īó▓┘ū„┐ņĮ▌Ą╚įSČÓā×(y©Łu)³c(di©Żn)ĪŻ╠žäe╩ŪRFID ╝╝ąg(sh©┤)į┌Ė▀╦┘▀\(y©┤n)äė(d©░ng)╬’¾wūR(sh©¬)äeĪóČÓ─┐ś╦(bi©Īo)ūR(sh©¬)äe║═ĘŪĮėė|ūR(sh©¬)äeĄ╚ĘĮ├µĄ─ā×(y©Łu)ä▌(sh©¼)Ż¼╩╣Ųõį┌║▄ČÓŅI(l©½ng)ė“Č╝Š▀ėąŠ▐┤¾Ą─░l(f©Ī)š╣?ji©”)ō┴”║═ÅVĘ║Ą─æ¬(y©®ng)ė├Ū░Š░ĪŻ
Ė▀╦┘╣½┬Ęū„×ķć°(gu©«)╝ęĄ─ųžę¬æ(zh©żn)┬į┘Yį┤Ż¼▓╗āH╠ßĖ▀▀\(y©┤n)▌öą¦┬╩Ż¼Č°Ūę▀Ć─▄£p╔┘▄ć(ch©ź)▌vōp║─Ż¼Ųõā×(y©Łu)įĮąį╩«Ęų═╗│÷ĪŻĄ½į┌░▓╚½ĘĮ├µŻ¼╬ęć°(gu©«)Ą─Ė▀╦┘╣½┬Ęģs▒Ē¼F(xi©żn)│÷┴╦▌^Ė▀Ą─╩┬╣╩┬╩║═é¹═÷┬╩ĪŻŽÓĻP(gu©Īn)蹊┐▒Ē├„Ż¼═©▀^(gu©░)║Ž└Ē┐žųŲÖC(j©®)äė(d©░ng)▄ć(ch©ź)▌vĄ─▄ć(ch©ź)╦┘╝░░▓╚½▄ć(ch©ź)ŠÓŻ¼┐╔ęįėąą¦▒ŻšŽĖ▀╦┘╣½┬ĘĄ─Į╗═©░▓╚½║═Ģ│═©Ż¼ŅA(y©┤)Ę└║═£p╔┘Į╗═©╩┬╣╩ĪŻ
Ą½╬ęć°(gu©«)Ė▀╦┘╣½┬Ę╣▄└ĒŽĄĮy(t©»ng)ųą¼F(xi©żn)ėąĄ─ę╗ą®Į╗═©Öz£y(c©©)╝╝ąg(sh©┤)Ż¼Ųõų„ę¬ū„ė├╩ŪÖz£y(c©©)Ą└┬Ę┴„┴┐ęį╝░×ķ│¼╦┘┴P┐Ņ╠ß╣®ģó┐╝ę└ō■(j©┤)Ż¼Č°─┐Ū░▒╗═ŲÅVĄ─GPS Č©╬╗ŽĄĮy(t©»ng)Ż¼¤o(w©▓)Ę©ī”(du©¼)╦┘Č╚▀M(j©¼n)ąąīŹ(sh©¬)Ģr(sh©¬)£y(c©©)┴┐Ż¼ŪęŲõČ©╬╗Š½Č╚ėąŽ▐Ż¼ęÓ▓╗─▄īŹ(sh©¬)Ģr(sh©¬)Ė·█Ö▄ć(ch©ź)▌vĪŻę“┤╦Ż¼╬ęć°(gu©«)į┌Ė▀╦┘╣½┬Ę░▓╚½╣▄└Ē╝░▒O(ji©Īn)┐ž▀@ę╗ŅI(l©½ng)ė“▀Ć┤µį┌▌^┤¾Ą─┐š░ūĪŻČÓŲš└šą¦æ¬(y©®ng)į┌Į³┤·┐ŲīW(xu©”)ųąėąų°ÅVĘ║Ą─æ¬(y©®ng)ė├ĪŻ╦³┐╔ė├ė┌£y(c©©)┴┐’wÖC(j©®)Ģr(sh©¬)╦┘Īóė^£y(c©©)╚╦įņąl(w©©i)ąŪ▀\(y©┤n)ąąŪķørĪó┤_Č©ąŪ¾w▀\(y©┤n)ąą╦┘Č╚Īó£y(c©©)┴┐ęĢŠW(w©Żng)─żč¬╣▄ā╚(n©©i)č¬┴„╦┘Č╚Ą╚ĪŻūŅ┤¾ČÓŲš└šŅlęŲ▀Ć╩Ū¤o(w©▓)ŠĆ═©ą┼ųąė├ė┌ā×(y©Łu)╗»ūį▀mæ¬(y©®ng)Įė╩šÖC(j©®)Ą─ųžę¬ģóöĄ(sh©┤)Ż¼ī¦(d©Żo)Ņlą┼Ą└£y(c©©)┴┐ĪóŪąōQ┼ąøQ║═╣”┬╩┐žųŲĄ╚ūį▀mæ¬(y©®ng)ā×(y©Łu)╗»╦ŃĘ©Č╝ę└┘ćė┌ī”(du©¼)╦³Ą─ėąą¦╣└ėŗ(j©¼)ĪŻ
▒Š╬─╗∙ė┌RFID ╝╝ąg(sh©┤)Ż¼═©▀^(gu©░)ī”(du©¼)ė╔▄ć(ch©ź)▌vęŲäė(d©░ng)╦∙«a(ch©Żn)╔·Ą─ČÓŲš└šŅlęŲ▀M(j©¼n)ąąīŹ(sh©¬)Ģr(sh©¬)╣└ėŗ(j©¼)Ż¼╠ß│÷ę╗ĘNĖ▀╦┘╣½┬Ę▄ć(ch©ź)▌vīŹ(sh©¬)Ģr(sh©¬)£y(c©©)╦┘╝░Č©╬╗ĘĮĘ©ĪŻ
2 ╦ŃĘ©─Żą═
ĮY(ji©”)║ŽĖ▀╦┘╣½┬ĘĄ─īŹ(sh©¬)ļHŪķørŻ¼▒Š─Żą═▓╔ė├¤o(w©▓)į┤Īóų╗ūx╔õŅl┐©Ż¼ė╔ė┌▒Š╔Ē▓╗ąĶę¬ļŖį┤║═ļŖ│žŻ¼ĮŌøQ┴╦Ė▀╦┘╣½┬ʤo(w©▓)ļŖį┤å¢(w©©n)Ņ}ĪŻ═¼Ģr(sh©¬)Ż¼¤o(w©▓)į┤╔õŅl┐©▓╗ąĶꬊSūo(h©┤)Ż¼Ūę╩╣ė├ē█├³║▄ķL(zh©Żng)Ż¼╣Ø(ji©”)╩Ī┴╦┤¾┴┐Ą─╚╦┴”┘Yį┤ĪŻ▄ć(ch©ź)▌dķåūxŲ„═©▀^(gu©░)░l(f©Ī)╔õ╝ż╗Ņą┼╠¢(h©żo)▓óÅ─¤o(w©▓)į┤æ¬(y©®ng)┤Ų„ųąĮė╩š╔õŅlą┼ŽóüĒ(l©ói)┤_Č©«ö(d©Īng)Ū░╬╗ų├ĪŻ×ķ╚ĪĄ├▌^▀h(yu©Żn)Ą─Ėąæ¬(y©®ng)ŠÓļxŻ¼▄ć(ch©ź)▌dķåūxŲ„æ¬(y©®ng)╣żū„į┌UHF ŅlČ╬ā╚(n©©i)Ż¼ŲõūR(sh©¬)äeŠÓļx┐╔ęį▀_(d©ó)ĄĮ╩«Äū├ūŻ¼ūŃęįØMūŃ«ö(d©Īng)Ū░Ė▀╦┘╣½┬ĘĄ─įO(sh©©)ėŗ(j©¼)ę¬Ū¾ĪŻ
2.1 ╔õŅl┐©ūR(sh©¬)äe┤aįO(sh©©)ų├
īó╔õŅl┐©Ą╚ŠÓįO(sh©©)ų├į┌Ė▀╦┘╣½┬ĘĄ─Ė¶ļxĦ╗“ū¾Īóėę┬Ę╝ń╠ÄĪŻ├┐éĆ(g©©)¤o(w©▓)į┤╔õŅl┐©æ¬(y©®ng)Š▀ėą╬©ę╗Ą─╔õŅlūR(sh©¬)äe┤aŻ¼įō╔õŅlūR(sh©¬)äe┤a░³└©Ė▀╦┘╣½┬ĘĄ─ūR(sh©¬)äe╠¢(h©żo)┤aĪó▄ć(ch©ź)Ą└öĄ(sh©┤)─┐ęį╝░┬ĘĦś╦(bi©Īo)ūR(sh©¬)Ż©╝┤▒Ē├„╦∙╠Ä╬╗ų├×ķū¾ėę┬Ę╝ń╗“Ė¶ļxĦŻ®Ż¼▓óę└┤╬įO(sh©©)ų├Ēśą“╠¢(h©żo)┤aŻ¼ęį▒Ń─▄ē“▒Ēš„ŲõĄž└Ē╬╗ų├╝░ŽÓæ¬(y©®ng)Ēśą“ĪŻ┤╦═ŌŻ¼į┌ID ╠¢(h©żo)┤aųą▀Ć┐╔ęį░³║¼Ė▀╦┘╣½┬ĘĄ─ŽÓæ¬(y©®ng)ś╦(bi©Īo)╠¢(h©żo)ĪóĖ▀╦┘╣½┬ĘĄ─▄ć(ch©ź)Ą└öĄ(sh©┤)─┐Ą╚ŠÄ┤aĪŻŠ▀¾wįO(sh©©)ų├╚ńłD1 ╦∙╩ŠĪŻ
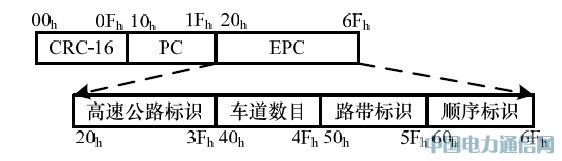
łD1 ╔õŅlś╦(bi©Īo)ūR(sh©¬)┤aįO(sh©©)ų├
2.2 öĄ(sh©┤)īW(xu©”)─Żą═
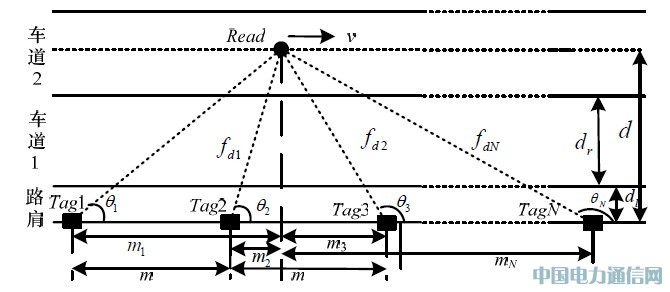
ė╔ė┌Č©Ž“╠ņŠĆ═©ą┼ŠÓļx▀h(yu©Żn)Ż¼Ė▓╔wĘČć·ąĪŻ¼─┐ś╦(bi©Īo)├▄Č╚┤¾Ż¼Ņl┬╩└¹ė├┬╩Ė▀Ūę╦∙╩▄Ė╔ö_ąĪŻ¼ę“┤╦īóķåūxŲ„╠ņŠĆįO(sh©©)Č©×ķČ©Ž“╠ņŠĆŻ¼ų╗─▄Įė╩šüĒ(l©ói)ūį┬Ę╝ń╗“Ė¶ļxĦę╗é╚(c©©)Ą─╔õŅlą┼╠¢(h©żo)ĪŻłD2 Įo│÷┴╦ķåūxŲ„Įė╩šüĒ(l©ói)ūį┬Ę╝ńę╗é╚(c©©)╔õŅl┐©ą┼ŽóĄ──Żą═ĪŻ▄ć(ch©ź)Ą└╝░┬Ę╝ńų«ķgė├īŹ(sh©¬)ŠĆĖ¶ķ_(k©Īi)Ż¼łAą╬┤·▒Ē▄ć(ch©ź)▌dķåūxŲ„Ż¼Šžą╬┤·▒Ēį┌┬Ę╝ńĄ╚ŠÓõüįO(sh©©)Ą─╔õŅl┐©ĪŻįO(sh©©)ę╗▄ć(ch©ź)▌dķåūxŲ„š²čžų°▄ć(ch©ź)Ą└2 š²Ž“ąą±éĪŻ
─│ę╗Ģr(sh©¬)┐╠Ż¼Įė╩šĄĮüĒ(l©ói)ūį╔õŅl┐©1,2,…Ż¼N Ą─ą┼╠¢(h©żo)ĪŻłDųąv ▒Ē╩Š▄ć(ch©ź)▌vąą±é╦┘Č╚Ż¼ 1 2 , , , N θ θ ??θ ×ķ▄ć(ch©ź)▌vŽÓī”(du©¼)╔õŅl┐©1,2,…Ż¼N Ą─ÅĮŽ“ĘĮŽ“┼c▄ć(ch©ź)▌vąą±éĘĮŽ“Ą─ŖAĮŪŻ¼m ×ķā╔╔õŅl┐©ķgĄ─ŠÓļxŻ¼m1,m2,…Ż¼mN ×ķ╔õŅl┐©1,2,…Ż¼N ═¼▄ć(ch©ź)▌vąą±éĘĮŽ“Ę©ŠĆķgĄ─ŠÓļxŻ¼d ×ķ▄ć(ch©ź)▌vĄĮ╔õŅl┐©┤╣ų▒ŠÓļxŻ¼dr ×ķ▄ć(ch©ź)Ą└īÆČ╚Ż¼dl ×ķ┬Ę╝ńīÆČ╚Ż¼ 1 2 d , d , , dN f f ?? f ×ķ▄ć(ch©ź)▌vŽÓī”(du©¼)╔õŅl┐©1,2,…Ż¼N Ą─ČÓŲš└šŅlęŲĪŻ
łD2 öĄ(sh©┤)īW(xu©”)─Żą═
Ė∙ō■(j©┤)Äū║╬ĻP(gu©Īn)ŽĄŻ¼┐╔ęįĄ├ĄĮŻ║

═¼Ģr(sh©¬)Ż¼į┌RFID ŽĄĮy(t©»ng)ųąŻ¼╔õŅl┐©▒Š╔Ē▓╗░l(f©Ī)╔õļŖ┤┼▓©Ż¼ų╗ī”(du©¼)üĒ(l©ói)ūįķåūxŲ„Ą─ļŖ┤┼▓©▀M(j©¼n)ąąĘ┤╔õĪŻę“┤╦Ż¼Ė∙ō■(j©┤)Įė╩šą┼╠¢(h©żo)ŽÓī”(du©¼)ė┌░l(f©Ī)╔õą┼╠¢(h©żo)Ą─ČÓŲš└šŅlŲ½fd ĻP(gu©Īn)ŽĄŻ¼▀Ć┐╔Ą├ĄĮŻ║

┬ō(li©ón)┴ó╩ĮŻ©1Ż®Īó╩ĮŻ©2Ż®Ż¼┐╔ęįĄ├ĄĮ2N éĆ(g©©)ĘĮ│╠Ż¼Č°╬┤ų¬öĄ(sh©┤)éĆ(g©©)öĄ(sh©┤)×ķ2N+2 éĆ(g©©)ĪŻīŹ(sh©¬)ļH╔ŽŻ¼«ö(d©Īng)2 éĆ(g©©)╔õŅl┐©╬╗ė┌▄ć(ch©ź)▌vąą±éĘĮŽ“Ę©ŠĆā╔é╚(c©©)Ģr(sh©¬)Ż¼ŲõŅlŲ½ųĄ▒ž╚╗×ķę╗š²ę╗žō(f©┤)Ż¼ę“┤╦Ż¼«ö(d©Īng)Öz£y(c©©)ĄĮ2 éĆ(g©©)ś╦(bi©Īo)ūR(sh©¬)┤aŽÓÓÅĄ─╔õŅl┐©p ║═╔õŅl┐©p+1Īófdp ║═fdŻ©p+1Ż®Ę¹╠¢(h©żo)ŽÓĘ┤Ģr(sh©¬)Ż¼┐╔ų¬ėąŻ║

┤╦═ŌŻ¼╚¶įO(sh©©)į┌ķåūxŲ„Įė╩šĄĮĄ┌N éĆ(g©©)╔õŅl┐©Ģr(sh©¬)ķ_(k©Īi)╩╝ł╠(zh©¬)ąąČ©╬╗╦ŃĘ©Ż¼ät┐╔Į³╦ŲšJ(r©©n)×ķķåūxŲ„┼c╔õŅl┐©N ų«ķgĄ─ŠÓļx×ķūŅ┤¾═©ą┼ŠÓļxR,ėąŻ║

┬ō(li©ón)┴ó╩ĮŻ©1Ż®Īó╩ĮŻ©2Ż®Ż¼ät┐╔Ū¾Ą├▄ć(ch©ź)▌vąą±é╦┘Č╚ęį╝░┼cN éĆ(g©©)╔õŅl┐©Ą─ŽÓī”(du©¼)╬╗ų├Ż¼▀M(j©¼n)Č°īŹ(sh©¬)¼F(xi©żn)ī”(du©¼)▄ć(ch©ź)▌v«ö(d©Īng)Ū░╬╗ų├Ą─£y(c©©)Č©ĪŻį┌ęčų¬┴┐ųąŻ¼mĪóR ╩ŪŽĄĮy(t©»ng)įO(sh©©)Č©Ą─Ż¼Č°N éĆ(g©©)fd ųĄätąĶę¬▀M(j©¼n)ąąīŹ(sh©¬)Ģr(sh©¬)╣└ėŗ(j©¼)ĪŻę“┤╦Ż¼ī”(du©¼)fd ╣└ėŗ(j©¼)Ą─£╩(zh©│n)┤_│╠Č╚╩ŪīŹ(sh©¬)¼F(xi©żn)Š½┤_Č©╬╗Ą─ĻP(gu©Īn)µIĪŻ
ĪĪĪĪ3 ČÓŲš└šŅlęŲfd Ą─╣└ėŗ(j©¼)
Į³─ĻüĒ(l©ói)Ż¼ęčėąČÓĘNfd ╣└ėŗ(j©¼)╦ŃĘ©▒╗╠ß│÷Ż¼╚ńį┌Ģr(sh©¬)ė“ųą└¹ė├ļŖŲĮ═©▀^(gu©░)┬╩▀M(j©¼n)ąąų▒Įė£y(c©©)┴┐[3]Īó╗“▓╔ė├Ģr(sh©¬)ŅlĘų╬÷ĘĮĘ©[4]Īó╗“└¹ė├ę╗ą®╠ž╩Ōąį┘|(zh©¼)╚ńOFDM ī¦(d©Żo)Ņlą┼╠¢(h©żo)üĒ(l©ói)╣└ėŗ(j©¼)ūŅ┤¾ČÓŲš└šŅlęŲ[5].
▀@ą®ĘĮĘ©ę¬├┤£y(c©©)┴┐Š½Č╚▀^(gu©░)Ą═Ż¼ę¬├┤▀\(y©┤n)╦Ń┴┐▀^(gu©░)┤¾Ż¼Š∙▓╗▀m║Žį┌RFID ŽĄĮy(t©»ng)ųąæ¬(y©®ng)ė├ĪŻ▒Š╬─ĮY(ji©”)║ŽRFID ŽĄĮy(t©»ng)╠ž³c(di©Żn)Ż¼▓╔ė├╣”┬╩ūV╣└ėŗ(j©¼)Ą─ĘĮĘ©Ż¼į┌Ņlė“?q©▒)Ź¼F(xi©żn)ī”(du©¼)fd Ą─╣└ėŗ(j©¼)ĪŻ
ė╔ė┌į┌▄ć(ch©ź)▌vęŲäė(d©░ng)▀^(gu©░)│╠ųąŻ¼▄ć(ch©ź)▌dķåūxŲ„┼cś╦(bi©Īo)║×ų«ķgĄ─ŽÓī”(du©¼)╬╗ų├╩Ū▓╗öÓūā╗»Ą─Ż¼ę“┤╦Ģr(sh©¬)ė“▓╔śė³c(di©Żn)öĄ(sh©┤)æ¬(y©®ng)▒M┴┐╔┘Ż¼ęį▒ŻūCfdųĄĄ─ŽÓī”(du©¼)ĘĆ(w©¦n)Č©ĪŻ¼F(xi©żn)┤·ūV╣└ėŗ(j©¼)ĘĮĘ©į┌Č╠öĄ(sh©┤)ō■(j©┤)ėøõøĄ─ŪķørŽ┬Ż¼Ųõąį─▄▀h(yu©Żn)▀h(yu©Żn)ā×(y©Łu)ė┌Įø(j©®ng)ĄõūV╣└ėŗ(j©¼)ĘĮĘ©ĪŻŲõųąŻ¼Burg ╦ŃĘ©▓╗ąĶę¬╣└ėŗ(j©¼)ūįŽÓĻP(gu©Īn)║»öĄ(sh©┤)Ż¼Š▀ėą▌^Ė▀Ą─ūV╣└ėŗ(j©¼)┘|(zh©¼)┴┐Ūęėŗ(j©¼)╦Ń▓╗╠½Å═(f©┤)ļsŻ¼╩Ū▌^×ķ═©ė├Ą─ĘĮĘ©Ż¼ęÓ▀m║Žį┌RFID ŽĄĮy(t©»ng)ųą╩╣ė├ĪŻ
ī”(du©¼)īóĮė╩šą┼╠¢(h©żo)▀M(j©¼n)ąąŽ┬ūāŅl▓óĄ╚ķgĖ¶Ģr(sh©¬)ė“▓╔śėŻ¼Ą├ĄĮą┼╠¢(h©żo)ą“┴ąxŻ©1Ż®Ż¼ xŻ©2Ż®Ż¼……, xŻ©nŻ® .▓╔ė├Burg ╦ŃĘ©▀M(j©¼n)ąąūV╣└ėŗ(j©¼)Ż¼▓ó└¹ė├Ę┤╔õŽĄöĄ(sh©┤)╣½╩ĮųąĄ─▀f═ŲĻP(gu©Īn)ŽĄ£pąĪ▀\(y©┤n)╦Ń┴┐Ż¼═¼Ģr(sh©¬)╩╣ė├ą┼Žóšō£╩(zh©│n)ätĘ©┼ąČ©AR ─Żą═ļAöĄ(sh©┤)P.
╦ŃĘ©╗∙▒Š▓Į¾E×ķŻ║
Ż©1Ż®įO(sh©©)Č©│§╩╝Śl╝■ĪŻ┴ŅĄ┌0 ļAŪ░Ž“Īó║¾Ž“ŅA(y©┤)£y(c©©)š`▓Ņą“┴ą×ķĢr(sh©¬)ė“▓╔śėą“┴ąĪŻ
Ż©2Ż®įO(sh©©)Č©ļAöĄ(sh©┤)m=1,ätĄ├ĄĮĘ┤╔õŽĄöĄ(sh©┤)k1 Īó─Żą═ģóöĄ(sh©┤)a1Ż©1Ż®╝░ūŅąĪŅA(y©┤)£y(c©©)š`▓Ņ╣”┬╩ρ1 .
Ż©3Ż®ė╔Ę┤╔õŽĄöĄ(sh©┤)k 1 Ą├ĄĮĄ┌ę╗ļAŪ░Īó║¾Ž“ŅA(y©┤)£y(c©©)š`▓Ņą“┴ą e1 f Ż©nŻ®Ż¼e1 b Ż©nŻ®ĪŻ
Ż©4Ż®┴Ņm = m+1,▓╔ė├▀f═ŲĘų─ĖDENmŪ¾│÷įōļAĘ┤╔õŽĄöĄ(sh©┤)km ╝░ūŅąĪŅA(y©┤)£y(c©©)š`▓Ņ╣”┬╩ĪŻ
Ż©5Ż®▓╔ė├ą┼Žóšō£╩(zh©│n)ätĘ©┼ąČ©ļAöĄ(sh©┤)P.┴ŅA(y©┤)ICm = N lnŻ©ρmŻ® +2m ,ŲõųąŻ¼N×ķöĄ(sh©┤)ō■(j©┤)xŻ©nŻ® Ą─ķL(zh©Żng)Č╚ĪŻ«ö(d©Īng)ļA┤╬mė╔1į÷╝ėĢr(sh©¬)Ż¼AICmæ¬(y©®ng)į┌─│ę╗m ╠Ä▀_(d©ó)ĄĮūŅąĪųĄĪŻę“┤╦Ż¼ ╚¶£y(c©©)Ą├į┌m ļAėą1 AICm
Ż©6Ż®ėŗ(j©¼)╦Ńm ļAŪ░Īó║¾Ž“ŅA(y©┤)£y(c©©)š`▓Ņą“┴ą emfŻ©nŻ® ĪóembŻ©nŻ® ╝░╦∙ėą─Żą═ģóöĄ(sh©┤)am Ż©iŻ®Ż¼ i = 1,2,……,m,ĘĄ╗žŻ©4Ż®ĪŻ
Ż©7Ż®«ö(d©Īng)AICm ≥AIC m-1 Ģr(sh©¬)Ż¼šf(shu©Ł)├„m-1 ╝┤×ķAR ─Żą═Ą─š²┤_ļA┤╬Ż¼ų┴┤╦Ż¼ęčŪ¾│÷╦∙ėąļA┤╬Ģr(sh©¬)Ą─AR ģóöĄ(sh©┤)Ż¼┐╔ī”(du©¼)AR ─Żą═Ą─╣”┬╩ūV▀M(j©¼n)ąą╣└ėŗ(j©¼)ĪŻ
Ż©8Ż®Ą├ĄĮ╣”┬╩ūV║¾Ż¼šęĄĮŲõĘ∙ųĄūŅ┤¾ųĄ╦∙ī”(du©¼)æ¬(y©®ng)Ą─Ņl┬╩ųĄŻ¼╝┤×ķfd ųĄŻ¼╦ŃĘ©ĮY(ji©”)╩°ĪŻ
╦ŃĘ©┴„│╠╚ńłD3 ╦∙╩ŠĪŻ
łD3 Burg ╦ŃĘ©┴„│╠
4 ╦ŃĘ©Ū¾ĮŌ
4.1 ┼ŻŅDĄ³┤·Ę©
īó╩ĮŻ©1Ż®~╩ĮŻ©4Ż®┬ō(li©ón)┴ó▓ó╗»║å(ji©Żn)Ż¼┐╔Ą├ĄĮ╚ńŽ┬ĘĮ│╠Ż║
īó╩ĮŻ©5Ż®īæ(xi©¦)│╔ŠžĻćą╬╩ĮŻ║

▓╔ė├┼ŻŅDĄ³┤·Ę©Ż¼įO(sh©©)ęčĄ├ĄĮĄ┌k ┤╬Į³╦ŲĮŌXk,ät┐╔Ą├Ż║
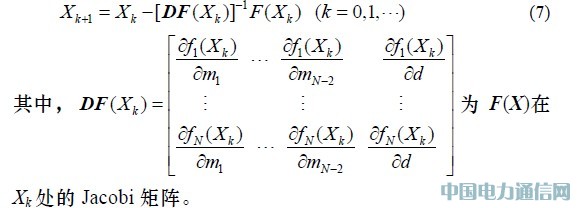
╩ĮŻ©7Ż®╝┤×ķ╩ĮŻ©6Ż®Ą─┼ŻŅDĄ³┤·╣½╩ĮŻ¼▓╔ė├Gauss-Jordan ĘĮĘ©Ū¾ĮŌJacobi ŠžĻćDFŻ©XkŻ®Ą──µŻ¼ät┐╔Ū¾Ą├X,┤_Č©▄ć(ch©ź)▌vĄ─īŹ(sh©¬)Ģr(sh©¬)╬╗ų├ĪŻį┘īóĮY(ji©”)╣¹┤·╚ļ╩ĮŻ©5Ż®Ż¼╝┤┐╔Ą├ĄĮ▄ć(ch©ź)▌v╦┘Č╚v.
4.2 │§ųĄįO(sh©©)Č©
ė╔ė┌┼ŻŅDĄ³┤·Ę©╩ŪŠų▓┐╩šö┐Ą─Ż¼ę“┤╦▀xČ©Ą─│§ųĄę¬ĮėĮ³ĘĮ│╠Ą─ĮŌŻ¼Ę±ätėą┐╔─▄Ą├▓╗ĄĮ╩šö┐Ą─ĮY(ji©”)╣¹ĪŻę“┤╦Ż¼║Ž└ĒĄž▀x╚Ī│§ųĄŻ¼▓╗āH─▄┤_▒ŻŪ¾ĮŌ▀^(gu©░)│╠▓╗░l(f©Ī)╔óŻ¼Č°Ūę▀Ć─▄£p╔┘Ą³┤·┤╬öĄ(sh©┤)Ż¼▀M(j©¼n)Č°£p╔┘╦ŃĘ©▀\(y©┤n)╦Ń┴┐ĪŻ
Ė∙ō■(j©┤)╩ĮŻ©3Ż®┐╔ų¬Ż¼ŽÓÓÅ╔õŅl┐©pĪóp+1 Ęųäeį┌▄ć(ch©ź)▌dķåūxŲ„ąą±éĘĮŽ“Ą─Ę©ŠĆā╔é╚(c©©)ĪŻę“┤╦Ż¼┐╔įO(sh©©)Ż║

ę└┤╬┐╔įO(sh©©)Ż║

┤╦═ŌŻ¼ė╔łD2 ▀Ć┐╔ų¬2dr + dl > d > dl .
5 Ę┬šµīŹ(sh©¬)“×(y©żn)
Ę┬šµ─Żą═ęŖ(ji©żn)łD2,įO(sh©©)┬Ę╝ńīÆČ╚dl=2 m,▄ć(ch©ź)Ą└īÆČ╚dr=5 m,├┐2 éĆ(g©©)╔õŅl┐©ų«ķgŠÓļxm=5 m,RFID ŽĄĮy(t©»ng)╣żū„Ņl┬╩f=915 MHz,ķåūxŲ„║═╔õŅl┐©Ą─ūŅ┤¾═©ą┼ŠÓļxR=14 m,▓╔śėŅl┬╩fs=1 600 Hz,▓╔śė³c(di©Żn)öĄ(sh©┤)N=128.┐╝æ]ĄĮĖ▀╦┘╣½┬ĘŁh(hu©ón)Š│▌^×ķ┐šĢńŻ¼║÷┬įČÓÅĮĖ╔ö_Ą─ė░ĒæŻ¼Ą½ė╔ė┌ķåūxŲ„Ą─Įė╩šą┼╠¢(h©żo)╩«Ęų╬ó╚§Ż¼ę“┤╦Ė╔ö_įļ┬Ģī”(du©¼)Ųõė░Ēæ▌^┤¾Ż¼įO(sh©©)ų├ą┼įļ▒╚SNB=-5 dBĪŻ
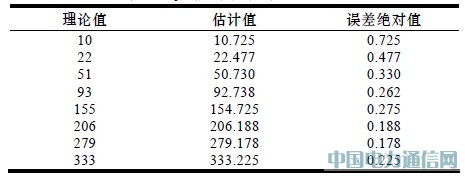
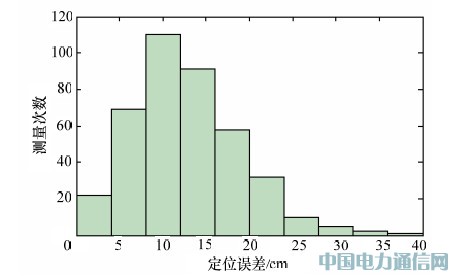
ßśī”(du©¼)▓╗═¼ČÓŲš└šŅlęŲļSÖC(j©®)īŹ(sh©¬)“×(y©żn)500 ┤╬Ż¼ŲõĮY(ji©”)╣¹╚ń▒Ē1 ╦∙╩ŠŻ©Ž▐ė┌Ų¬Ę∙Ż¼▀x╚Ī▓┐Ęų?j©½n)?sh©┤)ō■(j©┤)┴_┴ąŻ®ĪŻ┐╔ęį┐┤│÷Ż¼▒Š╬─╦∙▓╔ė├Ą─ūV╣└ėŗ(j©¼)ĘĮĘ©Š▀ėą▌^Ė▀Ą─╣└ėŗ(j©¼)Š½Č╚Ż¼š`▓Ņį┌0.8 Hz ęįŽ┬Ż¼ŪęļSų°fd ųĄ▓╗öÓį÷┤¾Ż¼š`▓ŅųĄ│╩£pąĪĄ─┌ģä▌(sh©¼)ĪŻ
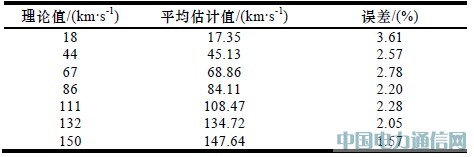
ĘųäeįO(sh©©)Č©v ×ķ30 km/hĪó60 km/hĪó90 km/hĪó120 km/hĪó150 km/h,ßśī”(du©¼)▓╗═¼╬╗ų├ī”(du©¼)▄ć(ch©ź)▌v╦┘Č╚▀M(j©¼n)ąąĘ┤Å═(f©┤)£y(c©©)┴┐Ż¼ŲõŲĮŠ∙š`▓Ņ╚ń▒Ē2 ╦∙╩ŠĪŻ«ö(d©Īng)▄ć(ch©ź)▌vĮėĮ³ņoų╣Ģr(sh©¬)Ż¼ė╔ė┌▓╗┤µį┌ČÓŲš└šŅlęŲ╗“ČÓŲš└šŅlęŲ╩«Ęų╬óąĪŻ¼ė╔ŽĄĮy(t©»ng)įO(sh©©)Č©v=0.ļSų°▄ć(ch©ź)▌vęŲäė(d©░ng)╦┘Č╚Ą─╠ßĖ▀Ż¼ė╔ė┌ČÓŲš└šŅlęŲį┌ŖAĮŪę╗Č©Ą─ŪķørŽ┬═¼╦┘Č╚│╩š²▒╚Ż¼ę“┤╦╦┘Č╚š`▓ŅĢ■(hu©¼)ļSų°fd £y(c©©)┴┐š`▓ŅĄ─£pąĪ┬į│╩Ž┬ĮĄ┌ģä▌(sh©¼)ĪŻ
łD4 Įo│÷┴╦400 ┤╬Č©╬╗ĮY(ji©”)╣¹š`▓ŅĘų▓╝ĪŻ┐╔ęį┐┤ĄĮŻ¼╣Ø(ji©”)³c(di©Żn)╬╗ų├š`▓Ņ╗∙▒Š╔Žį┌0.3 m ų«ā╚(n©©i)Ż¼ŲĮŠ∙š`▓Ņ×ķ0.1 m ū¾ėęĪŻ
▒Ē1 fd ╣└ėŗ(j©¼)ųĄ╝░š`▓Ņ Hz.
▒Ē2 ╦┘Č╚ŲĮŠ∙╣└ėŗ(j©¼)ųĄ╝░š`▓Ņ
łD4 Č©╬╗ĮY(ji©”)╣¹š`▓ŅĘų▓╝
6 ĮY(ji©”)╩°šZ(y©│)
▒Š╬─ßśī”(du©¼)╬ęć°(gu©«)¼F(xi©żn)ėąĖ▀╦┘╣½┬Ę╣▄└ĒŽĄĮy(t©»ng)¤o(w©▓)Ę©ī”(du©¼)▄ć(ch©ź)▌v▀M(j©¼n)ąąīŹ(sh©¬)Ģr(sh©¬)╣▄└Ē▀@ę╗¼F(xi©żn)ĀŅŻ¼╠ß│÷ę╗ĘNī”(du©¼)Ė▀╦┘╣½┬Ę╔Ž▄ć(ch©ź)▌v▀M(j©¼n)ąąīŹ(sh©¬)Ģr(sh©¬)£y(c©©)╦┘╝░Č©╬╗Ą─ĘĮĘ©ĪŻįōĘĮĘ©Š▀ėą▀\(y©┤n)╦Ń┴┐ąĪĪóŠ½Č╚Ė▀ĪóīŹ(sh©¬)╩®║å(ji©Żn)å╬Ą─╠ž³c(di©Żn)Ż¼┐╔ė├ė┌īŹ(sh©¬)¼F(xi©żn)Ė▀╦┘╣½┬Ę╔Žī”(du©¼)▄ć(ch©ź)▌vĄ─īŹ(sh©¬)Ģr(sh©¬)Ė·█Ö▒O(ji©Īn)┐žĪŻ▒Š╬─āH╩ŪīóRFID ╝╝ąg(sh©┤)æ¬(y©®ng)ė├ė┌Ė▀╦┘╣½┬Ę£y(c©©)╦┘╝░Č©╬╗ĘĮŽ“Ą─ę╗éĆ(g©©)║å(ji©Żn)å╬ćLįćĪŻ╚ń║╬ĮY(ji©”)║ŽīŹ(sh©¬)ļHŪķørŻ¼śŗ(g©░u)Į©╣”─▄═Ļ╔ŲĄ─£y(c©©)╦┘╝░Č©╬╗ŽĄĮy(t©»ng)Ż¼▓óį┌īŹ(sh©¬)ļHŁh(hu©ón)Š│ųą╝ėęįæ¬(y©®ng)ė├īó╩Ū▀M(j©¼n)ę╗▓ĮĄ─蹊┐ĘĮŽ“ĪŻ┤╦═ŌŻ¼įōĘĮĘ©▀Ć┐╔ęį═ŲÅVĄĮÖC(j©®)ł÷(ch©Żng)ĶF┬ĘĪó╣żśI(y©©)┴„╦«ŠĆ╝░┘É▄ć(ch©ź)┼▄Ą└Ą╚ČÓéĆ(g©©)ŅI(l©½ng)ė“Ż¼Š▀ėą▌^×ķÅVķ¤Ą─æ¬(y©®ng)ė├Ū░Š░ĪŻ