ę²čį
═©│ŻŻ¼¤oŠĆé„ĖąŲ„ŠWĮj(Wireless Sensor NetworksŻ¼WSN)ą┼Žó▓╔╝»╣سc╩Ū▒╗ļSÖCĘ┼ų├╗“╩ŪÅ─’wÖC╔ŽļSÖCÆü╚÷Ą─ĪŻę“┤╦╚ń║╬┤_Č©╣سcĄ─Š▀¾w╬╗ų├│╔×ķ¤oŠĆé„ĖąŲ„ŠWĮj蹊┐Ą─ļy³c║═ųž³cĪŻ
WSNĄ─Č©╬╗ų„ę¬Ęųī”╣سcūį╔ĒĄ─Č©╬╗║═ī”═Ō▓┐─┐ś╦Ą─Ė·█ÖČ©╬╗ĪŻWSNūį╔ĒČ©╬╗ĘĮĘ©Ęų×ķ╗∙ė┌£yŠÓĄ─ĘĮĘ©║═ĘŪ╗∙ė┌£yŠÓĄ─ĘĮĘ©ĪŻ╗∙ė┌£yŠÓĄ─Č©╬╗═©▀^£y┴┐ŽÓÓÅ╣سcų«ķgĄ─Į^ī”ŠÓļx╗“ĘĮ╬╗Ą╚üĒėŗ╦Ń╬┤ų¬╣سcĄ─╬╗ų├Ż¼ąĶę¬╠žČ©Ą─ė▓╝■įOéõŻ¼Č©╬╗Š½Č╚▌^Ė▀ĪŻČ°ĘŪ╗∙ė┌£yŠÓĄ─Č©╬╗ÖCųŲ¤oąĶ£yŠÓ╗“ĮŪČ╚ą┼ŽóŻ¼▓╗ė├ų▒Įė£y┴┐▀@ą®ą┼ŽóŻ¼āHĖ∙ō■ŠWĮjĄ─▀B═©ąįĄ╚ą┼ŽóīŹ¼F╣سcĄ─Č©╬╗Ż¼Ąõą═Ą─ėą┘|ą─╦ŃĘ©ĪóDV-Hop╦ŃĘ©Īó═╣ęÄäØ╦ŃĘ©║═APIT╦ŃĘ©Ą╚ĪŻ
ģó┐╝╬─½I╠ß│÷┴╦ę╗ĘNIAPITĄ─Č©╬╗ĘĮĘ©Ż¼ų„ę¬╦╝┬Ę╩Ūīó3▀ģ£y┴┐Ę©ęį╝░Äū║╬╔ŽĄ─ė╔ęčų¬ā╔³cį┌▌oų·Śl╝■Ž┬Ū¾ĮŌā╔łAĮ╗³cĄ─ĘĮĘ©╚┌╚ļĄĮAPIT╦ŃĘ©ųąŻ¼Ą½╩Ū╦ŃĘ©╚į╚╗ŠųŽ▐ė┌Č■ŠSš¼ķgųąĄ─Č©╬╗ĪŻģó┐╝╬─½I═©▀^ī”å╬╠°┘|ą─╦ŃĘ©▀MąąČÓ╠°öUš╣ęįĖ─╔ŲČ©╬╗▒╚┬╩Ż¼▓ó╝ė╚ļł÷ÅŖ╝ėÖÓ▀^│╠║═╚źųąą─╗»▀^│╠ęį╠ßĖ▀Č©╬╗Š½Č╚ĪŻģó┐╝╬─½I╠ß│÷īó╦∙ėą╩š╝»ĄĮĄ─üĒūįė┌═¼ę╗ą┼ś╦╣سcĄ─RSSIųĄū÷ŲĮŠ∙Ż¼ū„×ķ╬┤ų¬╣سcĮė╩šĄĮ┤╦╣╠Č©ą┼ś╦╣سcĄ─RSSIųĄŻ¼▀MąąČ©╬╗ėŗ╦ŃĪŻģó┐╝╬─½IĮY║Ž╚²ĮŪą╬£yįćįŁ└Ē(PIT)Ż¼ų„ę¬ßśī”ą┼ś╦╣سcĘų▓╝▓╗Š∙ä“Ą─Ūķør╠ß│÷┴╦CBPIT╦ŃĘ©ĪŻģó┐╝╬─½I╠ß│÷┴╦ę╗ĘN╣سcūį╔ĒĄ─Č©╬╗ĘĮĘ©Ż¼─▄ē“═©▀^ŽÓī”£╩┤_Ą─£yįćüĒ┤_Č©╣سc╦∙į┌Ą─ģ^ė“Ż¼Ą½╩Ūø]ėą┐╝æ]╬┤ų¬╣سc▒O┬ĀĄĮą┼ś╦╣سcöĄ─┐▌^╔┘Ą─ŪķørĪŻ
▒Š╬─ßśī”╚²ŠS┐šķgĄ─╣سcČ©╬╗╠ß│÷┴╦Ė─▀MĄ─TDAPIT╦ŃĘ©ĪŻ
1 ╦ŃĘ©├Ķ╩÷
1Ż«1 ągšZČ©┴x
ó┘ą┼ś╦╣سcŻ║ęčų¬╬╗ų├▓ó─▄ģfų·╬┤ų¬╣سcČ©╬╗Ą─╣سcŻ¼ę▓ĘQÕ^╣سcĪŻ
ó┌ÓÅŠė╣سcŻ║į┌╣سcĄ─═©ą┼ĘČć·ā╚Ż¼▓ó┐╔┼c▀@éĆ╣سcų▒Įė═©ą┼Ą─╦∙ėą╣سcĪŻ
ó█╬┤ų¬╣سcŻ║▓╗ų¬Ą└ūį╔ĒĄ─╬╗ų├Ż¼ąĶ╩╣ė├ą┼ś╦╣سcĄ─╬╗ų├ą┼Žó▓ó▀\ė├ę╗Č©Ą─╦ŃĘ©Ą├ĄĮ╣└ėŗ╬╗ų├Ą─╣سcŻ¼ę▓ĘQ┤²Č©╬╗╣سcĪŻ
ó▄ęčų¬╣سcŻ║█ū╩╝Ģr▓╗ų¬Ą└ūį╔ĒĄ─╬╗ų├ą┼ŽóŻ¼Ą½╩ŪĮø▀^ę╗Č╬ĢrķgĄ─Č©╬╗║¾Ż¼ęčĮø═©▀^ą┼ś╦╣سcĄ─╬╗ų├ą┼Žó▓óė├ę╗Č©Ą─╦ŃĘ©Ą├ĄĮ┴╦╬╗ų├ą┼ŽóĄ─╣سcĪŻ
ó▌▓╗┴╝╣سcŻ║Č©╬╗▀^│╠ĮY╩°║¾Ż¼╚į╚╗▓╗─▄ē“īŹ¼FČ©╬╗Ą─╣سcĪŻ
īŹļH╔ŽŻ¼WSNĄ─╣سcČ©╬╗╝┤╬┤ų¬╣سcį┌ą┼ś╦╣سcĄ─ģfų·Ž┬▐Dūā│╔ęčų¬╣سcĄ─▀^│╠ĪŻį┌īŹļHČ©╬╗▀^│╠ųąŻ¼ė╔ė┌ĘNĘNįŁę“Ż¼ļy├ŌĢ■│÷¼F▓╗┴╝╣سcŻ¼æ¬«ö▒M┴”£p╔┘▓╗┴╝╣سcĄ─éĆöĄĪŻ
1Ż«2 APIT╦ŃĘ©
APIT╦ŃĘ©Ą─╗∙▒Š╦╝Žļ╩Ū╬┤ų¬╣سc╚╬▀x3éĆŽÓÓÅą┼ś╦╣سcŻ¼£yįć╩Ūʱ╬╗ė┌╦³éā╦∙ĮM│╔Ą─╚²ĮŪą╬ųąŻ¼╩╣ė├▓╗═¼ą┼ś╦╣سcĮM║ŽųžÅ═£yįćŻ¼ų▒ĄĮĖF▒M╦∙ėąĮM║Ž╗“▀_ĄĮ╦∙ąĶČ©╬╗Š½Č╚ĪŻūŅ║¾Ż¼ėŗ╦Ń░³║¼─┐ś╦╣سcĄ─╦∙ėą╚²ĮŪą╬Į╗╝»Ą─┘|ą─╬╗ų├Ż¼▓óęį┤╦ū„×ķ─┐ś╦╣سc╬╗ų├ĪŻ
APIT╦ŃĘ©└Ēšō╗∙ĄA╩ŪPIT£yįćĪŻ╚ń╣¹┤µį┌ę╗éĆĘĮŽ“Ż¼▓óŪęčžų°┤╦ĘĮŽ“▀\äėĄ─╬┤ų¬╣سcĢ■═¼Ģr▀hļx╗“š▀╩ŪĮėĮ³╚²ĮŪą╬Ą─╚²éĆĒö³cŻ¼─Ū├┤┤╦╬┤ų¬╣سcį┌╚²ĮŪą╬Ą─═Ō▓┐Ż¼Ę±ätį┌╚²ĮŪą╬Ą─ā╚▓┐ĪŻ
į┌īŹļH£yįćųąŻ¼┐╔ęįė├╬┤ų¬╣سc║═╦³Ą─ÓÅŠė╣سcüĒ─ŻöM┤╦▀\äėĪŻ╚¶╬┤ų¬╣سcĄ─ÓÅ╣سcČ╝ø]ėą═¼Ģr▀hļx╗“┐┐Į³3éĆą┼ś╦╣سcŻ¼─Ū├┤┤╦╬┤ų¬╣سcŠ═į┌╚²ĮŪą╬ā╚Ż¼Ę±ätį┌╚²ĮŪą╬═ŌĪŻPIT£yįćĢrŻ¼ę╗░Ń▓╔ė├ą┼╠¢ÅŖČ╚üĒ┼ąöÓ▀hļx╗“š▀╩ŪĮėĮ³ą┼ś╦╣سcĪŻ
PIT£yįćš`▓ŅĘų╬÷╚ńŽ┬Ż║
ó┘PIT£yįćųą╚▌ęū│÷¼FInToOut║═OutToInÕeš`ĪŻInToOutÕeš`╝┤īó╚²ĮŪą╬ā╚▓┐Ą─³cš`┼ą×ķį┌╚²ĮŪą╬═Ō├µĪŻPIT£yįćłDŽ±╚ńłD1╦∙╩ŠĪŻ«ö╬┤ų¬╣سc┐┐Į³╗“š▀š²║├į┌╚²ĮŪą╬Ą─ę╗Śl▀ģ╔ŽĢrŻ¼Š═╚▌ęū│÷¼F╔Ž╩÷Ą─Õeš`ĪŻ
ó┌╚ń╣¹ą┼ś╦╣سc║═╬┤ų¬╣سcĄ─ÓÅŠė╣سc├▄Č╚▀^ąĪŻ¼ī”Č©╬╗ĮY╣¹Ą─ė░Ēæ║▄┤¾Ż¼ęų╗“╩╣Ą├ėąą®╣سc▓╗─▄▒╗Č©╬╗Ż¼Č©╬╗Ė▓╔w┬╩▌^Ą═ĪŻ

ó█į┌ŠWĮjĄ─ųąķg▓┐Ęų║═╬┤ų¬╣سcŽÓÓÅĄ─ą┼ś╦╣سc┐╔─▄║▄ČÓŻ¼Ą½╩ŪŲõųą╚╬ęŌ3éĆ╣سc╦∙ĮM│╔Ą─╚²ĮŪą╬┐╔─▄Č╝▓╗░³└©╬┤ų¬╣سcŻ¼ę“┤╦į┌╦ŃĘ©═Ļ│╔║¾╚į▓╗─▄Č©╬╗▀@ŅÉ╣سcĪŻ
ó▄į┌ŠWĮjĄ─▀ģŠē▓┐ĘųŻ¼╚▌ęūįņ│╔¤oĘ©ØMūŃAPITĄ─Č©╬╗Śl╝■Ż¼«ö║═╬┤ų¬╣سcŽÓÓÅĄ─ą┼ś╦╣سcöĄ─┐╔┘ė┌3éĆĢrŻ¼įņ│╔╬┤ų¬╣سc¤oĘ©Č©╬╗ĪŻ
ó▌ī”ųž»Bģ^ė“Ą─ųžą─ėŗ╦ŃųąŻ¼▓╔ė├Ą─╩ŪŠWĖ±Æ▀├ĶĄ─╦ŃĘ©Ż¼ą¦┬╩▌^Ą═Ż¼ėŗ╦ŃŠ½Č╚▓╗Ė▀ĪŻ
ó▐╦ŃĘ©ųąŻ¼╬┤ų¬╣سc▓╗āHę¬┼cą┼ś╦╣سcĮ╗╗źą┼ŽóŻ¼▀Ćę¬┼cŲõ╦¹Ą─ÓÅŠė╣سc▀Mąąģfš{ą┼Žó╠Ä└ĒŻ¼╩╣Ą├ŠWĮjųą╣سcĄ─ėŗ╦Ń┴┐į÷┤¾Ż¼═©ą┼ķ_õNę▓╔Ž╔²┴╦║▄ČÓĪŻ
1Ż«3 ╗∙ė┌APITĄ─╚²ŠSČ©╬╗ĘĮĘ©
1Ż«3Ż«1 TDAPIT╦ŃĘ©įŁ└Ē
ą┼ś╦╣سc╩ŪWSN┐šķgųąęčĮøų¬Ą└ūį╔Ēū°ś╦╬╗ų├Ą─╣╠Č©╣سc(╚ń═©▀^GPRSČ©╬╗Ą╚)Ż¼┐šķgųąĄ─╚╬ęŌę╗éĆ╬┤ų¬╣سcŻ¼─▄ē“▒O┬ĀĄĮą┼ś╦╣سcĄ─öĄ─┐×ķnŻ¼─Ū├┤Å─nųą╚╬ęŌ▀x╚Ī4éĆ³cĮM│╔ę╗éĆ╦─├µ¾wŻ¼╣▓ėąC4néĆ╦─├µ¾wŻ╗╚╗║¾Ż¼£yįćįō╬┤ų¬╣سc╩Ūʱį┌▀@4éĆą┼ś╦╣سcĮM│╔Ą─╦─├µ¾wā╚Ż¼ųžÅ═▀@ĘN£yįćŻ¼ų▒ĄĮ▒O┬ĀĄĮ╦∙ėąą┼ś╦╣سcĄ─ĮM║Ž╗“š▀╩Ū▀_ĄĮ┴╦ę¬Ū¾Ą─Š½Č╚Ż╗ūŅ║¾Ż¼ėŗ╦Ń░³║¼╬┤ų¬╣سcĄ─╦∙ėą╦─├µ¾wĄ─ųž»Bģ^ė“Ż¼īóųž»Bģ^ė“Ą─┘|ą─ū„×ķ╬┤ų¬╣سcĄ─╬╗ų├ĪŻ
1Ż«3Ż«2 TDAPIT£yįć
╚¶┤µį┌ę╗éĆĘĮŽ“Ż¼čžų°▀@éĆĘĮŽ“╬┤ų¬╣سcMĢ■═¼Ģr▀hļx╗“ĮėĮ³╦─├µ¾wĄ─╦─éĆĒö³cŻ¼ätM╬╗ė┌╦─├µ¾w═ŌŻ¼Ę±ätM╬╗ė┌╦─├µ¾wā╚▓┐ĪŻ
į┌ļSÖC▓┐╩Ą─é„ĖąŲ„ŠWĮjųąŻ¼ėąę╗ą®╣سcé╔┬ĀĄĮĄ─ą┼ś╦╣سcéĆöĄąĪė┌4Ż¼ät▀@ą®╣سc▓╗─▄▀MąąPIT£yįćŻ╗ėąą®╣سc▒M╣▄Įė╩šĄĮĄ─ą┼ś╦╣سcöĄ─┐┤¾ė┌╗“Ą╚ė┌4éĆŻ¼ę▓─▄▀MąąPIT£yįćŻ¼Ą½╩Ūģs╚į╚╗¤oĘ©┼ąöÓŲõ╬╗ų├ĪŻį┌£yįćųąŻ¼└¹ė├╚ńŽ┬ĘĮĘ©┼ąöÓ╬┤ų¬╣سc╬╗ų├Ż║
ó┘═©▀^╬┤ų¬╣سcĮė╩šĄĮą┼ś╦╣سcĄ─RSSųĄ┤¾ąĪüĒ┼ąöÓ╣سc║═ą┼ś╦╣سcų«ķgĄ─ŠÓļxĪŻ
ó┌═©▀^╬┤ų¬╣سcĄ─ÓÅŠė╣سcüĒ─ŻöM╬┤ų¬╣سcĄ─ęŲäėŻ¼╝┤╝┘įO╬┤ų¬╣سcęŲäėĄĮ╦³Ą─ÓÅŠė╣سcĪŻ
ó█═©▀^ī”╬┤ų¬╣سc╦∙ėąÓÅŠė╣سcĄ──ŻöMüĒĮ³╦ŲĄž▒ķÜv╬┤ų¬╣سcĄ─╦∙ėąĘĮŽ“ĪŻ
ó▄×ķ┴╦£p╔┘InToOut║═OutToInÕeš`Ż¼╬ęéā┐╔ęį═©▀^į┌╣سc╔ŽįOų├ŽÓæ¬Ą─MAXrss║═MINrssķōųĄüĒ▀Mę╗▓Į┼ąöÓĪŻī”ė┌│§▓Į┼ąČ©×ķį┌╚²ĮŪą╬═Ō▓┐Ą─╣سcŻ¼╚ń╣¹╬┤ų¬╣سcĮė╩šĄĮĄ─ą┼╠¢ÅŖČ╚ųĄ┤¾ė┌įOų├Ą─ķōųĄŻ¼ätšJ×ķ┼ąČ©Õeš`Ż╗═¼śėŻ¼ī”ė┌┼ąČ©×ķį┌╚²ĮŪą╬ā╚▓┐Ą─╣سcŻ¼╚ń╣¹Įė╩šĄĮĄ─ą┼╠¢ÅŖČ╚ąĪė┌įOČ©Ą─ķōųĄŻ¼ätšJ×ķ░l╔·OutToInÕeš`ĪŻ
1Ż«3Ż«3 TDAPIT╦ŃĘ©┴„│╠
TDAPIT╦ŃĘ©┴„│╠▓Į¾E╚ńŽ┬Ż║
ó┘╣سc▓┐╩═Ļ│╔║¾Ż¼ŠWĮj│§╩╝╗»┼õų├ĪŻą┼ś╦╣سcŽ“ŠWĮjÅV▓źŽ¹Žó(Ž¹Žóæ¬įō░³║¼ą┼ś╦╣سcĄ─IDĪó╬╗ų├ū°ś╦Ą╚ą┼Žó)Ż¼Č°╬┤ų¬╣سc▒O┬Āą┼ś╦╣سcĄ─Ž¹ŽóĪŻ┤╦ļAČ╬╬┤ų¬╣سcæ¬ļSĢrĖ³ą┬Įė╩šĄĮĄ─ą┼ŽóŻ¼ęįĘ└ų╣ī∙ŠWĮjĄ─═žōõūā╗»Č°įņ│╔Ą─š`▓Ņė░ĒæĪŻ
ó┌įO╬┤ų¬╣سcM▒O┬ĀĄĮĄ─ą┼ś╦╣سcöĄ─┐×ķn(n=0Ż¼1Ż¼2Ż¼3Ż¼4Ż¼5Ż¼6…)ĪŻą┼ś╦╣سcĄ─ū°ś╦×ķA1Ż¼A2Ż¼A3Ż¼A4Ż¼…Ż¼AnŻ¼╬┤ų¬╣سcīó▒O┬ĀĄĮĄ─ą┼ś╦╣سcĄ─ū°ś╦┤µ╚ļöĄĮMŻ¼╚ń╣¹nąĪė┌5ät└^└mŽ┬ę╗▓ĮŻ¼Ę±ät▐DŽ“▓Į¾Eó▄Ż╗
ó█«ön=4Īó3╗“2ĢrŻ¼╝┤╬┤ų¬╣سcų╗─▄▒O┬ĀĄĮ4Īó3╗“2éĆą┼ś╦╣سcĪŻęį╬┤ų¬╣سc╦∙─▄▒O┬ĀĄĮĄ─ą┼ś╦╣سc×ķłAą─Ż¼ęį═©ą┼ŠÓļx×ķ░ļÅĮĘųäeū„Ū“Ż¼ā╔Ū“ĘųäeŽÓĮ╗Ż¼ĘųäeŪ¾│÷4éĆŪ“¾wĪó3éĆŪ“¾wĪó2éĆŪ“¾wųž»Bģ^ė“Ą─┘|ą─ū„×ķ╬┤ų¬╣سcĄ─ū°ś╦ĪŻ
«ön=1╗“0ĢrŻ¼╝┤╬┤ų¬╣سcų╗─▄▒O┬ĀĄĮ1╗“0éĆą┼ś╦╣سcĪŻ┤╦ĢrŻ¼╬┤ų¬╣سcĄ╚┤²ę╗Č╬Ģrķgt(▀@└’tæ¬įOų├×ķ┬įąĪė┌Č©╬╗ų▄Ų┌)║¾Ż¼Ž“Ųõ╦∙ėąÓÅŠė╣سcÅV▓źŽ¹ŽóŻ¼šłŪ¾½@ų¬ÓÅŠė╣سcĄ─ū°ś╦ą┼ŽóĪŻ╚¶ø]ėąÓÅŠė╣سcĘĄ╗žŽ¹ŽóŻ¼─Ū├┤ųžÅ═ł╠ąą┤╦▓Į¾EŻ╗╚¶ėąÓÅŠė╣سcĘĄ╗žŽ¹ŽóĄ½ÓÅŠė╣سc╔ą╬┤Č©╬╗Ż¼ätą┼ś╦╣سc└^└mĄ╚┤²ę╗ąĪČ╬ļSÖCĄ─Ģrķg║¾Ż¼ųžÅ═šłŪ¾Ž¹ŽóŻ╗╚¶ėąÓÅŠė╣سcĘĄ╗žŽ¹Žó▓óŪęÓÅŠė╣سcęčĮøČ©╬╗═Ļ«ģŻ¼┤╦ĢrÓÅŠė╣سc│╔×ķęčų¬╣سcŻ¼ät╬┤ų¬╣سc░čęčų¬╣سc«ö│╔ą┼ś╦╣سcŻ¼ųžÅ═ł╠ąą▓Į¾Eó┘ĪŻ
ó▄Å─néĆą┼ś╦╣سcųą╚╬╚Ī4éĆ╣سcĮM│╔i(i=1Ż¼2Ż¼3Ż¼4Ż¼…Ż¼C4n)éĆ╦─├µ¾wŻ¼Ą├ĄĮ░³║¼╬┤ų¬╣سcĄ─╦∙ėą╦─├µ¾wŻ¼Ė∙ō■╦─├µ¾wŽÓĮ╗║¾Ą─ųž»Bģ^ė“ėŗ╦Ń┤╦ųž»Bģ^ė“Ą─┘|ą─ū°ś╦ū„×ķ╬┤ų¬╣سcĄ─ū°ś╦ĪŻ
1Ż«3Ż«4 ╦ŃĘ©Ęų╬÷
ą┼ś╦╣سcÅV▓źŽ¹ŽóĢrŻ¼▓╔ė├║ķĘ║Ą─ĘĮĘ©Ż¼╩╣Ą├═©ą┼ŠÓļxā╚Ą─╬┤ų¬╣سcČ╝┐╔ęį▒O┬ĀĄĮŽ¹ŽóŻ¼Č°Ūę╬┤ų¬╣سcų╗žōž¤▒O┬ĀŽ¹ŽóŻ¼▓ó▓╗ąĶę¬║═ŽÓÓÅ╣سc▀MąąŽ¹ŽóĮ╗ōQĪŻ▀@śėŠ═┤¾┤¾£p╔┘┴╦ŠWĮjųą╬┤ų¬╣سcĄ─═©ą┼┴┐Ż¼į÷╝ė┴╦ŠWĮj╔·├³ų▄Ų┌ĪŻĄ½╩Ū×ķ┴╦╩╣Ą├╬┤ų¬╣سc─▄ē“▒O┬ĀĄĮĖ³ČÓĄ─ą┼ś╦╣سcŻ¼╬ęéāįOČ©─▄┴┐▌^ČÓĄ─ą┼ś╦╣سcüĒÅV▓źā╔┤╬Ž¹ŽóĪŻĄ┌ę╗┤╬ÅV▓źŽ¹ŽóĢr═¼Ģr▒O┬Āų▄ć·Ą─ą┼ś╦╣سcĄ─ÅV▓źŻ¼īó▒O┬ĀĄĮĄ─Ųõ╦¹ą┼ś╦╣سcĄ─Ž¹ŽóėøõøŽ┬üĒĪŻĄ┌Č■┤╬ÅV▓źĢrŻ¼īó╦∙ų¬Ą└Ą─╦∙ėąĄ─ą┼ś╦╣سcĄ─ą┼ŽóČ╝ÅV▓ź│÷╚źŻ¼┤╦Ģr▒O┬ĀĄ─╣سcīóĮė╩šĄĮĄ─Ž¹Žó║═Ą┌ę╗┤╬Įė╩šĄ─Ž¹Žóī”▒╚Ż¼╚¶░l¼Fėąą┬Ą─ą┼ś╦╣سcät╝░ĢrĖ³ą┬ą┼ŽóĪŻ
ī”ė┌╬┤ų¬╣سc▒O┬ĀĄĮĄ─ą┼ś╦╣سcŻ¼▓╗─▄śŗ│╔╦─├µ¾wŽÓĮ╗Ą─Ż¼└¹ė├Ū“¾wųž║Žģ^ė“Ą─┘|ą─ū„×ķ╬┤ų¬╣سcĄ─ū°ś╦ĪŻ╚ń╣¹╬┤ų¬╣سc▒O┬ĀĄĮĄ─ą┼ś╦╣سcöĄ─┐▌^╔┘Ż¼┐╔ęį└¹ė├ęčĮøČ©╬╗═Ļ«ģĄ─╣سcüĒī”╬┤ų¬╣سc▀MąąČ©╬╗ĪŻį┌Ū¾ĮŌŪ“¾wųž║Žģ^ė“Ą─┘|ą─ĢrŻ¼┐╔ęį└¹ė├ŠWĖ±Æ▀├µ╦ŃĘ©Ż¼ėŗ╦Ń┴┐▌^┤¾Īóš`▓Ņ▌^ąĪŻ╗ę▓┐╔ęį└¹ė├╦─├µ¾w┘|ą─Æ▀├µ╦ŃĘ©Ż¼ėŗ╦Ń┴┐▌^ąĪĄ½╩Ūš`▓Ņ▌^┤¾Ż¼Ė∙ō■īŹļHŪķørėĶęį▀xō±ĪŻ
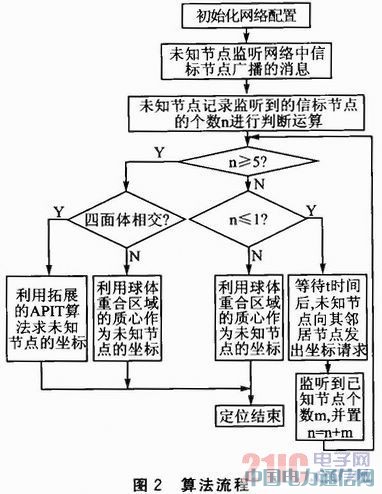
1Ż«4 ╦ŃĘ©┴„│╠
š¹éĆ╦ŃĘ©Ą─┴„│╠╚ńłD2╦∙╩ŠĪŻ
ĪĪĪĪ2 īŹ“×Ę┬šµ┼cįu╣└
▒Š╬─ųą▓╔ė├Ą─Ę┬šµ▄ø╝■╩ŪVisual C++┼cMatlab7Ż«5Ż¼▀x╚ĪĄ─īŹ“×ģóöĄ╩ŪČ©╬╗Ė▓╔w┬╩║═Č©╬╗š`▓ŅĪŻĘ┬šµīŹ“×ųąŻ¼200éĆ╣سc╩ŪļSÖC▓┐╩į┌▀ģķL×ķ80 mĄ─š²ĘĮ¾w▒O£yģ^ė“ā╚Ż¼ą┼ś╦╣سc║═╬┤ų¬╣سcĄ─═©ą┼░ļÅĮČ╝╩Ūę╗śėĄ─ĪŻ×ķ┴╦£p╔┘ļSÖCĘų▓╝║═┼╝╚╗ę“╦žÄ¦üĒĄ─ė░ĒæŻ¼Ę┬šµĄ─ĮY╣¹╩Ūį┌ŽÓ═¼Ą─ģóöĄŽ┬Ę┬šµ50┤╬Ą─ŲĮŠ∙ųĄĪŻ═©▀^▒╚▌^Č■ŠS┐šķgųąĄ─APIT║═╬─ųą╠ß│÷Ą─╚²ŠSTDAPIT╦ŃĘ©į┌▓╗═¼Ą─ą┼ś╦╣سc▒╚└²Ą─ŪķørŽ┬Ą─Č©╬╗Ė▓╔w┬╩║═Č©╬╗š`▓ŅŻ¼ūŅ║¾üĒĘų╬÷öUš╣║¾╦ŃĘ©Ą─ā×┴ėĪŻ
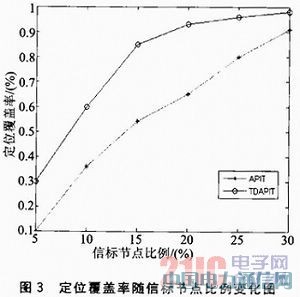
2Ż«1 Č©╬╗Ė▓╔w┬╩
Č©╬╗Ė▓╔w┬╩ļSą┼ś╦╣سc▒╚└²ūā╗»łD╚ńłD3╦∙╩ŠĪŻį┌ą┼ś╦╣سc▒╚└²×ķ5%ĢrŻ¼APITČ©╬╗Ė▓╔w┬╩╝s×ķ10%Ż¼Č°TDAPIT╝s×ķ30%Ż¼▀@šf├„ŽÓī”ė┌Č■ŠS┐šķgųąĄ─APITČ©╬╗Ż¼TDAPITČ©╬╗į┌╚²ŠS┐šķgųąĄ─Č©╬╗Ė▓╔w┬╩į┌ą┼ś╦╣سc▒╚└²▌^ąĪĢrŻ¼╚į─▄░lō]ŽÓ«öĄ─ą¦ė├ĪŻļSų°ą┼ś╦╣سc▒╚└²Ą─╔Ž╔²Ż¼TDAPITĄ─Č©╬╗Ė▓╔w┬╩Ė³╩Ū├„’@Ąž╔Ž╔²Ż¼į┌ą┼ś╦╣سc▒╚└²×ķ20%ū¾ėęĢrŻ¼Č©╬╗Ė▓╔w┬╩Š═▀_ĄĮ┴╦90%ęį╔ŽĪŻį┌▀@ęį║¾Ż¼ą┼ś╦╣سc▒╚└²Ą─į÷╝ėī”Č©╬╗Ė▓╔w┬╩Ą─ė░Ēæ┤¾┤¾ĮĄĄ═ĪŻ▀@╩Ūę“×ķį┌╦ŃĘ©ųą▓╔ė├┴╦裣höU╔óĄ─╦╝ŽļŻ¼╝┤īóęčų¬╣سc«öū÷ą┼ś╦╣سcüĒīŹ¼FČ©╬╗Ż¼ūŅ┤¾Ž▐Č╚Ąž£p╔┘┴╦▓╗┴╝╣سcĄ─öĄ─┐ĪŻį┌ą┼ś╦╣سc▒╚└²▀_ĄĮ30%ū¾ėęĢrŻ¼APIT╦ŃĘ©Ą─Č©╬╗Ė▓╔w┬╩į┌85%ū¾ėęŻ¼Č°Ūę╚į╚╗▀Ćėą╔Ž╔²Ą─┌ģä▌Ż¼šf├„APIT╦ŃĘ©ī”ą┼ś╦╣سc▒╚└²Ą─ę└┘ć│╠Č╚▒╚▌^Ė▀ĪŻ
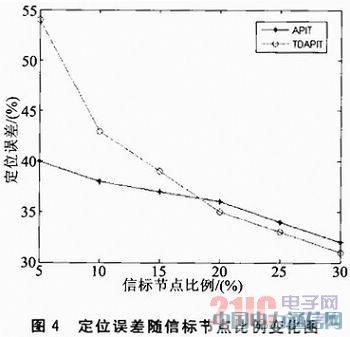
2Ż«2 Č©╬╗š`▓Ņ
Č©╬╗š`▓ŅļSą┼ś╦╣سc▒╚└²ūā╗»łD╚ńłD4╦∙╩ŠĪŻįōĘ┬šµĮY╣¹šf├„Ż¼į┌ŠWĮj▓┐╩ę╗Č©ĢrŻ¼«öā╔ĘN╦ŃĘ©Ą─Č©╬╗š`▓Ņ▀_ĄĮ35%ū¾ėęĢrŻ¼ā╔š▀Ą─Č©╬╗Š½Č╚║▄ļyį┘Ą├ĄĮ├„’@Ė─╔ŲĪŻį┌ą┼ś╦╣سc▒╚└²×ķ5%ū¾ėęĢrŻ¼TDAPITĄ─Č©╬╗š`▓Ņ├„’@┤¾ė┌APITĄ─Č©╬╗š`▓ŅŻ¼▀@╩Ūę“×ķį┌ŠWĮjĄ─│§╩╝ļAČ╬Ż¼APIT┐╔Č©╬╗Ą─╣سcöĄ─┐▌^╔┘Ż¼Č°TDAPIT─▄ē“Č©╬╗Ą─╣سcŽÓī”▌^ČÓŻ¼Č°ŪęTDAPITČ©╬╗ĢrŻ¼└¹ė├┴╦▒Š╔ĒČ©╬╗Š═ėąš`▓ŅĄ─ęčų¬╣سcŻ¼╩╣Ą├Č©╬╗│÷Ą─╣سcĄ─š`▓ŅĄ├ĄĮ└█╝ėŻ¼├„’@╝ė┤¾┴╦Č©╬╗š`▓ŅĪŻ«öą┼ś╦╣سc▒╚└²į┌20%ū¾ėęĢrŻ¼ā╔ĘN╦ŃĘ©Ą─Č©╬╗š`▓Ņūā╗»▓╗├„’@Ż¼┤╦Ģrį÷╝ėą┼ś╦╣سc▒╚└²ĢrŻ¼TDAP IT┬į’@ā׹ѯ¼Ą½Č©╬╗š`▓Ņ╚į╚╗į┌30%ęį╔ŽŻ¼ė╔┤╦┐╔ęŖ▀@ĘNĘŪ╗∙ė┌£yŠÓĄ─Č©╬╗ĘĮĘ©ļm╚╗│╔▒Š▌^Ą═ĪóīŹ¼F║åå╬Ż¼Ą½╩ŪČ©╬╗š`▓Ņ▒╚▌^┤¾Ż¼Č°Ūę«öą┼ś╦╣سc▒╚└²▀_ĄĮ30%ĢrŻ¼Č©╬╗š`▓Ņ╚į╚╗į┌30%ęį╔ŽŻ¼┤╦Ģr╝┤╩╣į÷╝ėą┼ś╦╣سcĄ─▒╚└²ę▓║▄ļyĖ─ūāČ©╬╗š`▓ŅĪŻ
ĮYšZ
▒Š╬─╗∙ė┌ŲĮ├µųąĄ─APIT╦ŃĘ©Ż¼╠ß│÷┴╦öUš╣Ą─╚²ŠSTDAPIT╦ŃĘ©ĪŻ▓óį┌Ęų╬÷APITš`▓ŅüĒį┤Ą─╗∙ĄA╔ŽŻ¼ī”TDAPIT▀Mąą┴╦ŽÓæ¬Ą─Ė─▀MĪŻöUš╣Ą─TDAPIT╦ŃĘ©─▄ē“▌^║├Ą─į┌╚²ŠS┐šķgųąīŹ¼F╣سcĄ─Č©╬╗ĪŻ═©▀^Ę┬šµīŹ“ׯ¼ļm╚╗į┌ŠWĮjĄ─│§╩╝ļAČ╬Ż¼TDAPITĄ─Č©╬╗Ė▓╔w┬╩į┌ą┼ś╦╣سc║▄╔┘Ą─ŪķørŽ┬▌^Ė▀Ż¼Ą½▀@╩Ūęįį÷╝ėČ©╬╗š`▓Ņ×ķ┤·ārĄ─ĪŻ